Run Amok Combat Robotics
Run Amok Combat Robotics
Transmitter Tweaks for Better Driving Control
Privacy Policy
|
Builders inexperienced with the full range of control options available on a modern computerized twin-stick transmitter too often believe that radio set-up ends as soon as they slap on an Elevon Mix and set the correct Failsafe response. In the heat of a fight with some adrenaline pumping they suddenly find their 'bot quite difficult to control: darting off in odd directions, unwilling to hold a straight line, impossible to hold in a smooth turn, and pointing anywhere but the direction needed. They start to think they aren't good drivers, when the problem may actually lay in their radio equipment and setup. Most transmitter-related tracking problems stem from four sources:
When the throttle stick is pushed forward it is not uncommon for one of the motor controllers to 'kick in' and start motor motion on one side of the robot just a bit sooner than the other side. One motor starting a bit early will throw the 'bot off at an angle and require delicate correction to re-aim under acceleration. The simplest approach to correcting unequal throttle start-up is to apply corrective trim to the steering channel. Yes, trim the steering to correct the throttle. This approach works with either transmitter-based mixing or an on-board mixing module:
Securely prop your robot up with the drive wheels off the ground:
Once you have the motor controllers synchronized for forward motion the signals are aligned, but they may not centered in the 'deadband' of the motor controllers. Having the signals off-center will cause one motor to start early when turning. This is a much smaller annoyance than forward motion de-synch, but if you like you can correct it.
Click the throttle stick trim once 'forward' and try a slow turn:
An alternative for transmitter mixing only is to use transmitter Subtrim. The Subtrim function adjusts the center position of individual receiver outputs, allowing two motor controllers mixed to a single transmitter stick to be individually adjusted. Move up the subtrim for the receiver port controlling the motor that is 'slow to respond' until it starts up in synch with the other motor. See the real world example at the bottom of this page for details on using subtrim with a transmitter mix.
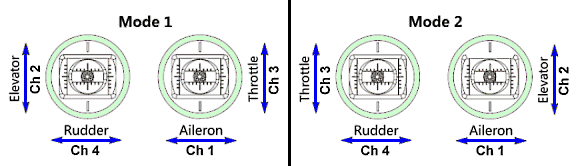
Throttle/Steering Interaction Running an 'aileron' channel mix with the US normal 'Mode 2' channel stick assignments puts both throttle and steering control on the right-hand stick. In the heat of combat it's easy to nudge the stick a little to the left or right while intending to push straight up. This throws the 'bot off to one side and requires a delicate correction to recover.
Switching the transmitter from 'Mode 2' to 'Mode 1' moves the elevon mix throttle control from the right stick over to the left stick but leaves steering control on the right stick, eliminating any accidental interaction. You'll need to add 'spring centering' to the left sick vertical axis, but it's well worth the effort.
Maintaining the delicate touch needed to control a robot in the heat of combat is difficult. Having the robot respond to a small stick inputs with a large turning motions makes it much more difficult. An intended small correction becomes way too much and you zigzag ineffectively across the arena. Two transmitter adjustments are available to bring this problem under control: 'Dual Rate' and 'Exponential Response'.
Dual Rate assigns a transmitter switch that will reduce the response of the robot to a specific transmitter stick axis by a specified amount. Setting a dual rate on the steering channel will reduce your robot's turn rate to keep your ‘bot composed under normal conditions, but allow a full-rate 'righting spin' or 'victory dance' at the flip of a switch.
Set up the elevon mix with both throttle and steering channels at 100%, then set up a dual rate on the steering channel with response rates of '50 Normal' and and '100 Sport'. Adjust as needed, remembering that your stick-throwing gets a bit extreme in combat.
Exponential Response affects fine-level control in a different way, and may be combined with 'Dual Rate'. Setting negative values of 'Expo' reduces the sensitivity of the control stick near the center of stick motion for improved fine control, but increases sensitivity as stick motion approaches the limit of travel to ‘squeeze in’ full response range.
Motor Speed Imbalance
Try differing amounts of negative expo on the steering channel to find what suits your driving style. Try a small amount of negative expo on the throttle channel to give more precise low speed control. Drive motors often run a little faster in one direction than the other, sending the 'bot in an arc rather than a straight line at full speed. It's not technically a transmitter problem, but we can adjust the transmitter signal to compensate.
End Points sometimes called 'ATV' or 'Travel Adjust' - set a limit on the throttle of ESC plugged into a specific receiver port. Reducing the speed of the faster motor of a pair can transform a high-speed arcing turn into a straight charge across the arena.
A Real World Example
Most transmitters allow independent limits for each side of the center 'neutral' position, allowing correction of both forward and reverse speed imbalance. Below is an actual question and answer from the Ask Aaron Combat Robot Q&A website that details adjustments to a FlySky FS-i6 transmitter to solve driveability problems reported by the builder. The motor start-up adjustment could be made with stick trim, but the builder is using transmitter mixing and I've found subtrims easier to explain.
Q: So I've built a 4wd antweight bot with four N20s for drive run by a dual brushed ESC. I've sorted out my own custom mixing for the right stick on my FlySky FS-i6 but I've got two problems with control.
1) If I push the drive fully forward my bot is real zippy fast and I have a little trouble controlling it. Great for rushing, not so great for turning. But if I only push the drive a little forward in an attempt to slow down, one side starts driving before the other and I turn instead of going forward. So I need to either go faster than I'd like, or start by turning away from a straight line.
2) My other problem is that I turn SO FAST. All 4 motors are spinning to turn me around and it's very easy to spin out, especially with my plastic wheels on a smooth floor.
I would like to get my motors synced up better and slow down the turn rate, but I'm not sure where to start and I only figured out my current mix through trial and error. Any ideas?
A: I'm not sure why you decided to create custom mixes when you could just turn on the built-in FS-i6 Elevon mix but since you went to all the trouble to figure it out we'll just leave it alone and fix your other issues. Both of your problems are common and have fairly easy solutions. Unequal Motor Start-up: 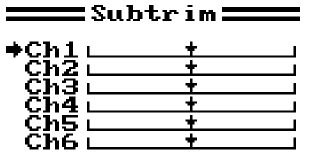 The FS-i6 Subtrim function adjusts the center positions of individual receiver outputs. Each side of a dual motor controller mixed to a single transmitter stick can be individually adjusted so that both sides power up together rather than one side turning on first. This technique works only with transmitter mixing.
The FS-i6 Subtrim function adjusts the center positions of individual receiver outputs. Each side of a dual motor controller mixed to a single transmitter stick can be individually adjusted so that both sides power up together rather than one side turning on first. This technique works only with transmitter mixing.
To set subtrim: prop the drive wheels off the ground and push the throttle forward slowly 'til motors on one side just start to turn. Select the receiver channel controlling motors on the side not yet turning (usually: left is Ch1, right is Ch2) and adjust the 'Subtrim' setting until the drives on both sides of the robot turn at the same slow rate and direction.
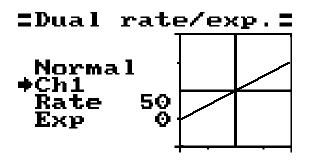 We'll set a Dual Rate for steering Ch1. A rate of 50% is a good starting point -- adjust up/down to your own liking.
We'll set a Dual Rate for steering Ch1. A rate of 50% is a good starting point -- adjust up/down to your own liking.
|