











|


Privacy Policy  Even small combat robots can be dangerous! Learn proper construction and safety techniques before attempting to build and operate a combat robot. Do not operate combat robots without proper safeguards.
Even small combat robots can be dangerous! Learn proper construction and safety techniques before attempting to build and operate a combat robot. Do not operate combat robots without proper safeguards.
Ask Aaron is a simple little question and answer page. People ask questions about combat robots and we do our best to answer them.
Recently I've received some messages where the bulk of the text is used to express views or opinions that would be better suited as social media posts. Although I found the topics of these messages personally interesting, I did not publish them and I will continue to reject submittals of this type. I won't have Ask Aaron turned into Reddit. Let's keep it to combat robot questions, please. An Appreciated Tribute
October is a somber time here at Team Run Amok. For several years after Aaron's passing I would shut down all of runamok.tech for part of the month. This year my spirits have been lifted by a tribute to Aaron posted on Facebook by "Robot Enthusiast and All-Around Man of Supreme Awesome" Alex Valentine. Here is an excerpt:
Day 15 of Bot-tober 24 is dedicated to the late, great Aaron Joerger. He's the lawnmower, you're the grass... straight from Robotica, it's Run Amok!
Here's a link to the full post on Facebook. Thanks, Alex.
 As has become something I like to do as part of my drawing events, I've dedicated the midpoint of this year's run to another late, great roboteer. After Rex Garrod (2020) and Grant Imahara (2021), Day 15 of
As has become something I like to do as part of my drawing events, I've dedicated the midpoint of this year's run to another late, great roboteer. After Rex Garrod (2020) and Grant Imahara (2021), Day 15 of With its relatively simple box-wedge design, Run Amok was a nice change of pace from the complex death machines that I've been drawing for you all so far. The chequer-plate wedge was pretty fun to work out properly, and I'm overall very happy with the look; and hopefully, bot-fans, you'll agree. This one's for you, Aaron! Previously Answered
 Q: What should be the max and minimum rpm of weapon
Q: What should be the max and minimum rpm of weapon
A: [Mark J.] Although I very much wish to support the technical aspects of robot construction in the energetic and expanding Indian subcontinent, I am also greatly worried that I may be contributing to an extremely dangerous situation for builders and spectators. This has brought me to a painful decision:
The best enclosed arenas in India would be considered inadequate for 30 pound robots in Europe or the US but are hosting events for 132 pound 'bots. Aaron certainly wouldn't approve of the reckless endangerment of life and limb, and I will not contribute to the development of robots competing in India until arenas in the region are universally able to safely contain them.
The specific question you ask has been discussed multiple times here at 'Ask Aaron'. You are free to search for those discussions should you be willing to do so.
How Time Flies
Q: Guess what day it is... It's the one year anniversary of The Iceywave Troll-igy!
Since October 11th, 2023 I've received a few messages from people that I know who want me to send their questions to you. I'm not sure why they don't just send you the questions directly, but either way, here they are...
Thank you for hosting my page for the past year! I hope to look back on this many years from now and say "This is where my comedy writing first began".
-sincerely, Iceywave : ) A: You're welcome. Remember: every comedian needs a straight man -- and the straight man gets 60% of the take. You Can Use What You Have
Q: I'm looking at building a featherweight robot for a competition next year. I have transferable experience in most aspects of building a combat robot but my radio control knowledge is limited.
I have recently purchased a RadioMaster Pocket ELRS transmitter to use with a drone but I don't see robot drivers using these. Can I use this transmitter for a combat robot? Many robot builders talk about OpenTX. Do I need a separate transmitter module to plug in the back of my transmitter for that? Should I buy a FS i6 like many people recommend? I'd like to stay as cheap as possible while still getting good quality equipment that I won't have to replace soon.
A: [Mark J.] Your RadioMaster transmitter will do very nicely. It runs EdgeTX firmware which is a newer development from OpenTX. There is nothing your will need for a featherweight combat robot that the RadioMaster cannot provide. The drawback is that both OpenTX and EdgeTX are very complex systems that can be difficult for new users to figure out.
Most of my guide to Programming an OpenTX Transmitter for Combat Robotics applies to EdgeTX transmitters as well. EdgeTX menus are a little different (Video) but the functions are essentially the same. Take a look at the guide and see what you think.
If you find programming an EdgeTX transmitter overwhelming, the FlySkyFS-i6 has a MUCH SIMPLER menu driven setup. My guide to Programming the FlySky FS-i6 Transmitter for Combat Robotics can have you operational in very little time.
Kinetic Energy vs. Momentum
 Q: Spinning weapons are always rated by how much kinetic energy they store (joules), but doesn't momentum also matter? If you have two spinners with the same kinetic energy storage how does momentum effect their destructive potential?
Q: Spinning weapons are always rated by how much kinetic energy they store (joules), but doesn't momentum also matter? If you have two spinners with the same kinetic energy storage how does momentum effect their destructive potential?
A: [Mark J.] Momentum does have an effect on destructive potential, but you may be surprised by what that effect turns out to be.
Here are the equations for Kinetic Energy and Momentum:
Momentum = Mass × Velocity
Being struck by the runaway frozen turkey will attempt to accelerate you (and the chair) to ten miles-per-hour, but conservation of momentum will reduce the final speed of the combined turkey/skateboard/human/chair mass. Because of the higher approach speed the turkey will exert the accellerating force (kinetic energy) over a shorter period of time and, because the definition of power is work per unit time, the impact will be greater. Could leave a nasty bruise.
Getting hit by a 100+ MPH baseball is just plain ugly. The ball will attempt to transfer its entire accellerative force in a blink, resulting in a great deal of force exerted in a small impact area. We're talking potential broken bones and knocking the you/chair straight over. The full energy will be absorbed at the impact site and will not be dissipated over significant time and distance. This is a trip to the emergency room.
Pick One Easy to Use
Q: What type of ESC works best with the FingerTech Silver Spark 16mm Gearmotors? [Fremont, California]
A: [Mark J.] FingerTech Silver Sparks do not place great demands on their speed controllers. With a 2-cell LiPo battery they draw a maximum current of 1.6 amps at stall -- 2.4 amps with a 3-cell battery. The Repeat Robotics Budget Ant DESC is a very affordable, compact, and versatile dual-channel ESC for brushed motors. It is favored by many competitors for ease of use and durability. They Do Different Things
Q: Are there any benefits to a front hinged lifter/flipper compared to a "normal" rear hinge? [Sacramento, California]
A: [Mark J.] From a 2012 post in the Robot Weapons archive:
Q: Do front hinged flippers have any advantage over back hinged flippers? A: The two designs have different applications. Relative to the resting angle, a rear-hinge flipper will launch an opponent in a high and upward arc, and a front hinge flipper will launch the opponent in a lower arc to the front. Match the flipper design to the arena, your attack strategy, and the overall design of your robot. I Have a FAQ For That
Q: how many joules does a 15 pound battle bot weapon need A: [Mark J.] The very first question in the Ask Aaron Spinning Weapon FAQ is: "How much energy should my spinning weapon store?". It will be in your best interest to read the entire FAQ. Being Irrational
Q: What's the square root of 24?
A: [Mark J.] I dislike giving imprecise answers here at Ask Aaron. As the square root of 24 is a non-repeating non-terminating irrational number the best precise answer I can provide is the simplified radical form: √24 = √(2×2×6) = 2√6
If you prefer imprecise: √24 = not quite five.
Feeling Overwhelmed
Q: Designing my first bot and have watched quite a few videos on it, but still feel overwhelmed, I'm aiming for a 1lb plastic since it sounds like the easiest to get into, and I want it to be a shuffler for the .5lb bonus with a spring powered hammer so it's at least a little unique.
I'm trying to figure out how to set up the electronics for fairly cheap and it sounds like a good start is a dual brushed ESC with two high ratio n20's but n20 motors say they are rated for 6v so is the 7.4v-8.4v of a 2s too much for them? I know there are better motors but I don't feel comfortable buying multiple $20 motors without a bit more understanding and I'm pretty sure a BEC can't provide enough current for running a whole bot. I already have a Flysky controller and receiver, so I only need a power switch, esc, and motors. I thought that the most economical solution would be a Fingertech switch ($7), Repeat Electronics 'Budget Ant DESC' ($15), but then got stuck at the motors since the cheapest reliable motors I saw were $20 a pop which felt like a lot since I'd probably need three for the drive and hammer, can I just buy a few pairs of cheap n20's for $5 each and not have to worry about them failing immediately?
And for the hammer I'm going to cannibalize a cheap servo that I already have, then throw some extra mosfets on it to run a snail cam that can safely charge and discharge the hammer; so I don't need an esc for the weapon motor.
A: [Mark J.] So, for your first 'bot you've decided to build a plastic ant shuffler with a pair of the cheapest N20 motors you can find on a mild voltage boost dragging around a cam-and-spring hammer weapon controlled by a canibalized cheap servo board with extra MOSFETs. I wonder why you're feeling overwhelmed?
You've already rejected my standard advice on what a first robot should be, ignored my detailed list of reasons for that advice, and dismissed my opinion on cheap robot parts. I wonder what value you might place on my advice to the questions you now ask, particularly if I tell you something else you don't want to hear. Let's find out...
Turn Two Into Four
Q: How can I convert an antweight into a 4 wheel drive? What gears or pulleys are to be used for that? [London, England]
A: [Mark J.] Given your location I'll assume we're discussing 150 gram UK antweights. You haven't told me anything about the design you would like to 'convert' so my comments must be very general.
Weebles Wobble
Q: Help me unpack this discussion I'm having with a friend right now. He argues that one could solve the gyro dance problem that verticals have by attaching the vert to a powered rotating module (like how a gyro walker's weapon is mounted) and rotating it opposite to the turning direction. His argument is that the net forces would cancel out and the robot would turn without lifting. I feel like this is incorrect but I can't explain why. [Sacramento, California]
A: [Mark J.] If I properly understand your description, your friend is mostly correct. When force is applied to change the direction in which the axis of a spinning mass is pointing, gyroscopic forces act to realign the angular momentum vector in a direction perpendicular to the applied force. If you allow the weapon freedom to follow that realignment there is no force exerted on the chassis to lift one side of the 'bot in a 'gyro dance'. Note that you don't need to power the rotation of the weapon module -- the gyro forces do that work for you.
The video below is from the 2002 "Oregon Clandestine Street Fight" -- more event videos here. Team Mauser campaigned 'Strike Terror' at Comedy Central BattleBots seasons 4 and 5.
"By the way, there's nothing but gyroscopic forces making the wheel tip. It's totally free to move. The Season 4 version had a spring to help it return to center, which I should have kept."
Flashback Post from 2021
 Q: Hey, Mark! 2020 has been a rough year for all of us, so I'm hoping to bring something to my local competition this year. I'd like to bring something entertaining or unique to the table, but I keep running into the same problem: I can't decide on what to build, and I can't bring myself to completing any of the projects I've started even when I get the CADs close to complete.
Q: Hey, Mark! 2020 has been a rough year for all of us, so I'm hoping to bring something to my local competition this year. I'd like to bring something entertaining or unique to the table, but I keep running into the same problem: I can't decide on what to build, and I can't bring myself to completing any of the projects I've started even when I get the CADs close to complete.
I've gone everywhere from antweight clamps like 'King Googly' to overengineered monstrosities like 'Saturn' and most recently, an antweight version of 'Black and Blue' (render attached). Alas, after I get the CAD complete I still find myself dissatisfied, leading to a redesign from the ground up, then disliking something about that, and the whole process keeps happening. I don't know if other people have a similar problem. Is there any advice you can give on what I should do? What am I doing wrong? [Aurora, Illinois]
A: [Mark J.] Yes, other people have similar problems. It's called procrastination, but putting a title on it won't solve the issue. 'Psychology Today' has a list of 11 Ways to Overcome Procrastination that you might like to read thru. The one that may best fit your description is #11:
Perfectionism is an all-or-nothing mentality: Something is either perfect, or it is a failure. People with perfectionistic tendencies tend to wait until things are perfect in order to proceed—so, if it's not perfect, you cannot be finished. Or if it is not the perfect time, you believe you can't start. This all-or-nothing mentality can hold you back from starting or completing tasks.
Instead, focus on being better than perfect. This means to still strive for excellence, creating excellence, or setting yourself up with excellent conditions, but at the same time, you focus on getting the job done. #DoneIsBetterThanPerfect Wacky Trigger and Wheel
Q: I built a 150g fairyweight using a FlySky GT5 pistol grip transmitter and a Malenki Nano to control the n20 motors and a spinner. I got it all wired up, but when I pull the transmitter trigger the bot spins/turns and when I twist the transmitter wheel the bot goes forward/backward. Is something I can do to fix this? Seems like I need to swap channels 1 and 2 on the transmitter but not sure. [Parts Unknown]
A: [Mark J.] There aren't too many things you can get wrong when setting up a Malenki Nano and a simple transmitter like the FlySky GT5. The most common problem is getting the polarity wrong on one of the drive motors, which causes the exact symptoms you report. The fix is simple:
Reply: Yep this fixed it. Thanks! Adjust Size as Needed
Q: what wheels to use
A: [Mark J.]
If you give me no information about your robot, I can give you no guidance on components.
It's Just Too Much
Q: I'm using a Flysky i6x transmitter with a Malenki Nano receiver/ESC in my fairyweight, but the turning is too fast. How do I turn it down? [Social Media]
A: [Mark J.] The easiest and most flexible solution is to assign a 'Dual Rate' for CH1:
Q: Could you set 'End Points' for Ch1 to get the same steering sensitivity adjustment?
A: The short answer in this particular case is 'Yes', but it is preferable to use a 'Dual Rate'.
Longest Internal Diagonal
Q: Can my 30lb thwack bot be 6 feet long in NHRL? I heard that the longest it could be was 3 feet but I don’t know if I read it right so I’m super confused. [Social Media]
A: [Mark J.] Just to make things complicated, the NHRL has a 'cube rule' for dimensions: "12lb and 30lb robots must be able to fit into a 36 x 36 x 36-inch box."
The 'bot does not have to sit flat on the box floor -- design your 'bot to fit into into the longest internal diagonal of the box and it could have a maximum dimension up to ( 32 + 32 + 32 ) 0.5 ≈ 5.2 feet. Plus, there is a loophole that allows even greater length:
"Once the match begins, robots are allowed to expand or contract to any size."
If your 'bot can unfold of otherwise expand when it starts moving it can become much longer.
Machinations
Q: Did NHRL ever announce if/when they would release the teams tournament special on YouTube? I’m asking because I need footage of the event for a video I’m working on.
-sincerely, Iceywave
A: [Mark J.] I no longer care to discuss machinations of the National Havoc Robot League. Rodger the Web Gerbil has relatives in Connecticut and has been asking for more editorial responsibility, so I'll let him handle this topic.
My cousin Sidney in Norwalk tells me that the ESPN TV networks have exclusive rights to all video footage from the NHRL Teams Tournament Finals thru the end of August. NHRL says they will release full coverage of the event on their YouTube channel in September.
A Job With Benefits
Q: I hope Roger the Web Gerbil enjoyed his vacation. I also have a couple favors to ask him.
In the Robotica Competitor Gallery, 'Ill Tempered Mutt' and 'PSHHHT!' have incorrect links for their wiki pages. I've attached the correct links. A: [Mark J.] Hey, you're pretty good at this. I could sack that annoying rodent and give you his job. It comes with a water bottle, an exercise wheel, and a fresh scoop of alfalfa pellets every other day -- but you have to clean your own cage. Interested?
Q: And a commenter on Ill Tempered Mutt's page said that a robot of the same name tried to enter Robot Wars in 2017 but failed to qualify. I’ve never heard of this supposed robot before. Have you?
-sincerely, Iceywave
A: The Robot Wars Wiki lists an 'Ill Tempered Mutt' from Team Underdog that attempted to qualify for both the 9th and 10th Wars. It was a thwackbot with a horizontal circular saw in its long tail.
"And yes, we were inspired by the robot of the same name from Robotica 2.0. There needs to be more canine machines."
- Matt Robinson, Team Underdog on Facebook So Very Many Types
Q: What type of battle robot weapons are there, and what are the different categories that deal the most damage? [ATT Network]
A: [Mark J.] The Wikipedia article on Robot Combat has a extensive section on "combat robot weaponry and design" that includes a very long list of weapon types with a discussion of each type.
I will point out that the most damaging weapons are not the most successful in winning matches, particularly for new builders. Take a look at Frequently Asked Questions #8 and What Weapons Win.
Make Two Like Four
Q: I've been seeing robots like Swamp Thing and Sawblaze be able to ram other bots while being 2 wheeled. What is it that is done for 2 wheeled robots to be able to push and ram other bots similar to 4 wheeled ones?
A: [Mark J.] What is it that is done to arrange words into a beautiful sonnet? There is no one thing done to enable precision control and pushing power on a two-wheeled 'bot -- there is a long list, and you have to get everything on that list right. Here is part of that list:
Bulky With Limited Motion
Q: Would any of the spring flipper options be efficient in a four-bar flipper design like Ziggy or Defiant? [East Texas]
A: [Mark J.] I see two problems in adapting any of the Four Spring Flipper Designs to power a 4-bar flipper:
Hypothetical Thinking
Q: Hi. I am thinking about building a hypothetical 1 lb cam lifter akin to NHRL's "Supreme Ruler" or "Needle/Ace" from BattleBots. So far, I am in the stage of part selection and I have some questions.
A: [Mark J.] I'm wondering how you decided on two KingMax servos.
Overvolting There is no 'standard' used by servo manufacturers to determine a maximum allowable voltage, and there is no agreement on a safety margin. Some servos are limited by the voltage ratings of their electronics, while others may establish a voltage limit to remain under the current capacity of the electronics or motor when stalled. Running a servo at a voltage above the stated limit may:
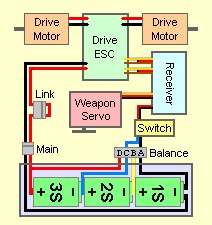
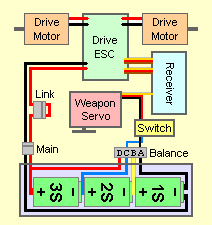
Battery Tap You can tap into the balance connector on your 3S LiPo to feed 7.4 volts direct to your servo while still supplying 11.1 volts to your motors. The amount of current used by the servos is small relative to the drive motors -- just balance charge the LiPos every time to keep the cells happy. If your receiver can run at 7.4 volts, clip the red receiver wires on the tinyESCs and the wiring diagram (which shows a single dual-channel ESC) looks like this:
Reply: Hi, cam lifter person again. I decided upon using a KingMax KM1203MD servo because I used the desired stall torque formula from the Electric Lifter FAQ, multiplying the theoretical blade length, opponent weight, and the 1.67 factor together. I was unaware that the formula is different for cam lifters. Having extra torque is good, but my initial choice was absolutely overkill.
Length of Lifter Arm (inches) × Weight Class (ounces) × 1.67 =
Response: [Mark J.] Aha! Cam lifters were not a thing when the lifter FAQ was written. "Length" in the above formula refers to the maximum distance perpendicular to the axis of rotation at which your opponent might be lifted -- which in the case of a cam lifter will generally refer to the width of the blade rather than the length that gets shoved under them. I've added a section on cam lifters to the lifter FAQ. Q: Additionally, I didn't consider that the blades could be run off a single servo. What kind of linkage system would you recommend for this application? Upon digging through Wikipedia and remembering an old Youtube video, my best guess would be some sort of modified "Watt linkage", but I would like to hear your thoughts.
A: A Watt's linkage is tricky to get to work for this application, and it isn't needed. Although 'Supreme Ruler' and 'Needle/Ace' rotate their blades in opposing directions it's more efficient to rotate them in the same direction to avoid scraping them across the underside of the opponent as the edges converge. A simple linkage setting a tie rod between two "steering" arms and running a drag link to the servo will work nicely. As the blades draw closer to vertical the torque requirement is reduced, so you don't need to get fancy. I leave trigonometry behind this as an exercise for the reader. Crude animation:
Addendum: Your wiring diagrams were extremely helpful, and your suggestions will certainly help me lower the amount of weight I need for electronics. Can Ants Do That?
Q: I've heard of ants making a simple hub motor mount for weapons out of TPU, but I'm not sure how they do it. Is it a press fit? Do they use set screws? [Sacramento, California]
A: [Mark J.] I'm going to interpret "ants making a simple hub motor mount for weapons" as an antweight direct-drive weapon hub rather than a mount for a weapon hub motor made by ants. Tell me if I'm wrong.
I don't believe I've seen a good match for what you describe. I've seen soft and squishy TPU sandwiched between motor/hub and around the mounting screws to cushion the motor from impact shock, but I can't recall seeing a single-piece TPU weapon hub. I can tell you:
Q: Specifically I'm talking about this one horizontal spinner named Cheesecake. I know he has a lot of videos posted on his channel but I haven't found one yet explaining the hub. I was just hoping to see if you had any insight thanks.
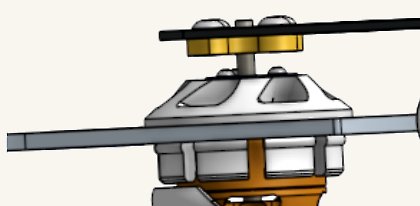
A: That gives me something to work with. I wrote to the builder of 'Cheesecake' and asked for some details on the weapon hub. Alex F. was kind enough to write back quickly and confirm my assumption that the hub bolts to the top of the weapon motor, but the design has a very clever method of locking the weapon blade in place:
A very few minutes later...
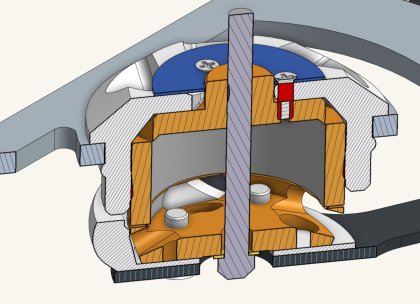
Here's a cross section of the hub. It pushes down onto the motor, is held down by three screws, and the act of pushing it down onto the motor causes the collet to flare out, clamping onto the inner diameter of the weapon bar.
I also found this side view of the weapon hub that shows the slots in the side of the hub that allow it to flex enough to 'click' down into the hole in the weapon blade before the assembly slides down over the rotor and is secured by screws into the top of the rotor:
Frequently
Q: how to desing abeetle weight bot [Puducherry, Bharat] A: [Mark J.] See Frequently Asked Questions #2. Read the rest of the FAQ while you're there. Can You Trust the Gerbil?
Q: Hello, I am wondering what thickness of TPU I should use for my beetleweight minibot? I started off with quarter inch, but it turned out to be to heavy. What should I do?
A: [Mark J.] See Frequently Asked Questions #17.
Mark is kinda touchy about questions that don't provide the silly little details that might give him a chance to come up with a quantified answer. This time though, I think he missed something. I have access to all of his notes and the exotic software that he doesn't share with the robot community, and I found this equation filed under "If All Else Fails":
Q: how can robots help us deal better with hurricanes and why? [Ontario, California] A: [Aaron] Few people in Nebraska are threatened by hurricanes, so send a swarm of killer robots into low Atlantic and gulf coastal areas to drive the puny human inhabitants toward Nebraska. Problem solved. Robot haiku:
|

 Q: Are there any advantages for front hinged flippers? It seems to me they push their opponents around more than anything else.
Q: Are there any advantages for front hinged flippers? It seems to me they push their opponents around more than anything else.

 For more complex mixing problems I recommend the
For more complex mixing problems I recommend the 




 If the receiver needs a lower voltage, leave the tinyESC leads alone and run the servo power and ground direct to the 7.4 volts:
If the receiver needs a lower voltage, leave the tinyESC leads alone and run the servo power and ground direct to the 7.4 volts:
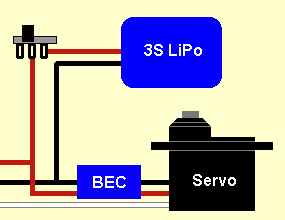
 If you still want to use a UBEC, the voltage regulator, battery, and servo are wired in like this, with power and ground (red and black) wires running to the ESCs and the signal wire (white) going to the receiver:
If you still want to use a UBEC, the voltage regulator, battery, and servo are wired in like this, with power and ground (red and black) wires running to the ESCs and the signal wire (white) going to the receiver:
 There are some refinements available, but it's late and it's been a long day.
There are some refinements available, but it's late and it's been a long day.
 I think that gives a good overview of the weapon hub design.
I think that gives a good overview of the weapon hub design.
 Q: What do your combat robots think of the current COVID-19 pandemic? [Kansas City, Missouri]
Q: What do your combat robots think of the current COVID-19 pandemic? [Kansas City, Missouri]
 We welcome combat robot questions. Please search the
We welcome combat robot questions. Please search the