Questions and Answersabout Combat Robotics from Team Run AmokPrivacy Policy
This page is one of several archives of 'Ask Aaron' questions and answers categorized by topic. To see the most recent questions or to ask a new question, go to the Ask Aaron Home Page.
Take a tour of posts in this Ask Aaron Archive that have been referenced to answer new questions. Click the 'Mystery Post Tour' button above to get started.
Too Many Unknowns - Redux
Q: We are building a featherweight with a spring-loaded spear weapon. We are looking to buy a flat sheet of aluminum and bend them to create the external armor of the robot. I have looked at various thicknesses and performed several FEA on said thickness. I am stumped what thickness do you think is the most optimal for our robot? [Baton Rouge, Louisiana]
A: Mark J. No competent engineer would spec material thickness before knowing a great deal more about the design and the competition than you have told me.
There is aluminum and there is A L U M I N U M. Different aluminum alloys vary widely in strength. The 3003 alloy you buy off the rack at the local home center is soft and weak. The 6061-T6 alloy is nearly as strong as mild steel and is widely available thru metal dealers. Aircraft alloys like 2024-T3 and 7075-T6 are much harder and nearly twice as strong -- but are expensive, difficult to find, and difficult to work with.
The strength of a structure depends on more than the thickness of the material. The shape, angle, and method of support provided all bear on impact resistance.
Finite Element Analysis (FEA) is a powerful tool -- if you know the magnitude and direction of the forces that will be applied to the structure. In combat robotics neither of these can be well quantified. The best guide is to examine the armor structure used by successful combat robots of similar weight and design to yours. In doing so you will find precious few featherweight robots using aluminum armor.
The bottom line is that your robot must withstand the weaponry of your opponents. If they are using spring-loaded weaponry capable of attacking with a few dozen joules of kinetic energy your armor can be quite thin and of common material. If your opponents employ rotary weapons delivering thousands of joules with tool steel impactors you will need thicker armor of more exotic origin.
Q: The college student from Baton Rouge here. I did not provide enough information on that featherweight with a spring-loaded weapon... My bad! Our combat robot competitions differs from regular combat robot competitions. The objective is pushing other robots off a 16 x 16 ft arena, so the primary loading on the chassis is expected to be ramming, sustained pushing, and edge/corner impacts rather than high-energy weapon strikes.
We are planning to fabricate our external armor/frame as a single bent metal sheet of 5052-H32 aluminum, formed on a sheet-metal press brake (bent side, front, and back panels). We chose 5052-H32 specifically for its formability and toughness. We are currently considering 0.080" thickness, since it is affordable, easy to bend, and relatively light. However, several people have suggested 0.25" thickness for durability. Given the amount of sheet metal required, 0.25" would significantly increase both cost and weight.
Based on your experience, is 0.080" 5052-H32 generally sufficient for this level of combat, assuming a properly designed bent chassis with flanges/gussets? Or is stepping up to something closer to 0.25" truly necessary for durability in push-out competitions?
A: Warning: Mark is having a rough day and is known for being a bit terse under such circumstances.
Mark J. 5052-H32 is a fairly 'strong' aluminum-magnesium alloy known for being highly ductile and easy to bend. "Easy to bend" is not an attribute you should be looking for in material you will be ramming into hard objects. Armor that deforms enough to lift a wheel off the ground or obstruct its motion is far worse than no armor at all. Certainly 0.080" thick 5052 is unsuitable and 0.25" thick 5052 would - IMO - just be a heavier unsuitable solution. Quite seriously, you would be better off building a box out of good quality 1/4" plywood -- plywood doesn't bend.
Box chassis construction using aluminum top and bottom panels with thick UHMW polyethylene side panels and a steel front wedge or 'wedgelettes' is well established in "sportsman class" (no spinner weapons) combat robots around your weight.
One of Them Flies
Q: could you help compare High-Density Polyethylene to PCB and carbon fiber? [Hot 'Lanta]
A: Mark J. That's a very general question about three materials with very different properties and uses. It's a bit like asking me to compare a helicopter to a coconut and a dollar bill.
Ask the Google AI to compare high-density polyethylene to garolite and carbon fiber. I just tried that and got a quite detailed categorized comparison. After you study that you will be able to ask me appropriate specific questions about how those materials might best be used for individual components in a combat robot.
Date marker: January 2026
Doesn't Want Cleats
Q: I've heard of RC tire preparation - heating, chemically softening, scoring wheels, but it seems like that stuff when applied to cast urethane wheels on you hubs either does not apply or would provide only a limited benefit for the first few encounters in a 2 or 3 minute match on a wooden floor.
I was wondering if you have experience / recommendation for tire preparation beyond alcohol wipes / cleaning a cast urethane tire up. Cleats seem the primo option for max traction on wooden floors for beetles but I've had issues with opponents mangling mine so I'd like to look for advantages with urethane wheels. [Terre Haute, Indiana]
A: Mark J. The Brazilians swear by two methods to improve polyurethane tire traction:
Clean the tread surface with WD-40. It reacts with the surface to create a softer sticky layer without effecting the durability of the urethane core. Spray it on, wipe it off, fight. Repeat before every match.
Sticky treads collect dust, grit, and oil which smear around their surface. Casting or cutting lateral and/or diagonal grooves into the tire provides voids into which the tire can wipe collected gunk, allowing the tire to clean itself rather than just continuing the smearing. Diagonal grooves give a smoother rolling action than do lateral grooves.
Ultra High Molecular Weight
Q: what precautions or tips must I follow while making my 15kg robot by using UHMWPE material for my chassis [Maharashtra, India]
A: Mark J. You are free to search thru the large number of posts about UHMW in the Ask Aaron Archives but I will not do that work for you.
Although I very much wish to support the technical aspects of robot construction in the energetic and expanding Indian subcontinent, I am also greatly worried that I may be contributing to an extremely dangerous situation for builders and spectators. This has brought me to a painful decision:
The 'Ask Aaron' website is closed to questions from builders competing in India.
The best enclosed arenas in India would be considered inadequate for 30 pound robots in Europe or the US but are hosting events for 132 pound 'bots. Aaron certainly wouldn't approve of the reckless endangerment of life and limb, and I will not contribute to the development of robots competing in India until arenas in the region are universally able to safely contain them.
Cardboard and Imagination
Q: I work at a California Public Library and I want to create a program introducing children to combat robotics. I want to put the kids into teams and have them build and then fight their robots. I want to keep things safe for kids and cost effective with out compromising the coolness of the bots. How would you recommend card board vs PLA plastic for the frame and chasis? [Murrieta, California]
A: Mark J. I like the sound of this!
I'll assume we're talking about thin sheets of PLA to be cut/folded/assembled. While this could certainly work I'm personally very fond of cardboard as a construction material.
Easy to cut/trim with scissors or rotary cutters;
Accepts pen/pencil markings without smudging;
Bonds well and rapidly with non-toxic adhesives;
Quickly laminates for increased strength and stiffness; and
Can be recycled at the end of the day.
Throw in some popsicle sticks and a few colorful markers/stickers/googly-eyes and you have a great activity. Send me some photos?
You might get a few ideas from this video: Build a Cereal Box Combat Robot!
One Better Than Two
Q: My spinner has an XL timing pulley with a 1/2" toothed section for the belt and 1/8" thick flanges on each side, making it 3/4" thick in total. However, I couldn't find a needle bearing in that size with a 3/8" shaft diameter. Is it fine to squash two half-sized (3/8" wide) bearings in the pulley bore side by side? [Ashburn, Virginia]
A: Mark J. Is that pulley your entire weapon hub? It is better to have a wider hub that separates weapon bearings for a more stable base to improve stability and strength. Needle bearings are sensitive to even small static misalignment. Jamming two needle bearings right up against each other will magnify the effect of any installation or bore problems. You might be fine -- you might not be.
I would prefer one of two alternatives:
A single 5/8" wide needle bearing. Add small spacing washers on each end to assure it stays centered.
A full-width sintered bronze ("Oilite") sleeve bushing. With proper lubrication this type of bushing adds very little friction, can survive enormous impact loads, and will not wear into non-hardened shafts.
Keys are the Standard
Q: How do builders in the heavier weight classes go about attaching a pulley to their weapon motor shaft? I know set screws can't be the answer here. I've seen some builders reshaft their motors with a thicker shaft for a keyway but are there any other methods out there? [Sacramento-ish]
A: Mark J. Depends on what you consider "heavier weight classes". Last I heard you were building a beetle and/or a hobbyweight.
Keyed hubs are the standard for combat robots above the insect classes for good reasons: compact, reliable, and widely supported by manufacturers. You need good reason to not use them.
I have used Trantorque keyless bushings (cross-section pictured) to lock pulleys and sprockets onto smooth shafts with good success. They come in a good range of sizes but are generally too bulky to use on motor shafts. They are also a bit pricey.
Down on the lower end of 'big bots' I see some builders using clamping hubs that surface-bolt onto pulleys and sprockets. A seach for 'clamping hubs' will turn up a variety of styles.
Date marker: January 2025
Gram-for-Gram
Q: You often mention garolite as a suitable material for a combat robot. I replaced a damaged 6061 aluminum panel on my beetle with G10 garolite but had it fail under similar conditions. Isn't garolite supposed to be stronger than aluminum? Am I using the wrong type of garolite or is it just used if you need to save weight? [The Other Windy City]
A: Mark J. I'm gonna guess that you replaced the failed aluminum panel with a garolite panel of the same thickness. Except for density (aluminum weighs 50% more than an equal volume of garolite) the physical properties of G10 and 6061 are similar. The failure modes of a metal and a fiber composite differ but if an aluminum panel fails, a garolite panel of the same thickness will likely fail as well.
Gram-for-gram, garolite is stronger than aluminum. A garolite panel 50% thicker than the failed aluminum panel would weigh the same while offering greater strength. For improved strength think equal weight, not equal thickness.
Adjust Size as Needed
Q: what wheels to use [Uttar Pradesh, Bharat]
A: Mark J.
If you give me no information about your robot, I can give you no guidance on components.
Nickel is Expensive
Q: I am currently designing a custom asymmetric eggbeater for my beetleweight combat robot. It stores 511 Joules of energy and the max bite is 10.6mm. I quoted this beater out of 4340 and it turned out to be $118; past my budget. If I switch to 4140 steel (which is less expensive) will there be any significant difference?
Also, should I get it treated to 49 or 53 HRC? 53 is harder than AR500, while 49 is not. The only thing is that 53 has a slightly lower impact toughness, so what should I do?
Thank you for answering my question! [South of Hartford, Connecticut]
A: Mark J. The 4140 alloy steel contains no nickel. That makes 4140 raw stock less expensive than 4340 but reduces its strength and notably its fracture toughness (difference between toughness and fracture toughness video) -- particularly at higher hardness quench/tempers.
You did not provide details of your design so I cannot even guess at the importance of the strength and toughness you would lose by choosing 4140 steel. The real question is how many 4140 beaters will you break before you decide you should have gone with 4340 alloy?
If you decide to go with the 4140 alloy its toughness/hardness chart indicates a good balance at about HRC 50 so I would suggest the lower hardness temper. My sources put the hardness of AR500 steel at about 47 HRC so a 49 HRC on 4140 is a bit harder.
You're Just Messin' With Me
Q: 1mm titanium vs 5mm aluminum: which is better? I'm asking for my "Break-Your-Fist-on-my-Face™" configuration for Flamin'Yon. It's still a standard Viper wedge kit (so no bad hamburgers, I'm assuming?).
-sincerely, Iceywave☆ [West of San Antonio]
P.S. I... don't actually have anything else to say. It just feels so weird sending a post that isn't unnecessarily L-L-O-O-N-N-G-G : )
A: Mark J. Come on, Iceywave. I know that you've read every word of all the Ask Aaron archives and sub-pages -- including FAQ #17 and the Bad Hambuger page. You expect me to believe that you can't recognize bad hamburger when you see it? You're just messin' with me:
To what use will you put the material? I'd guess 'wedge', but you aren't specifying.
There are MANY aluminum alloys that range in strength from '3003' found at your local Home Depot that folds up like cardboard to '7075-T6' that has 90% of the strength of 304 stainless steel at a third of the weight.
Titanium also comes in various grades. Grade 2 (pure) is no better for structural properties than a poor aluminum alloy, but Grade 5 (Ti-6Al-4V) is strong and super-tough.
Titanium alloys are only about 1.6 times as dense as the aluminum alloys, so the proper weight-for-weight comparison is 3mm titanium vs. 5mm aluminum. Titanium throws pretty sparks when hit while aluminum smears. The stock 3mm polycarbonate Viper wedge weighs 27 grams:
If you want the better performance for a given weight of wedge: 3mm Grade 5 titanium (100 grams).
If your choice is between 1mm titanium and 5mm aluminum: 5mm '7075-T6' or '2024-T3' aluminum (100 grams). What's the difference?
If it was my choice: 2mm AR400 steel (116 grams) for its toughness and hard surface -- but you didn't ask for another option.
You Need a Go-Between
Q: I recently saw the post on using silicone to coat wheels as the antweight Algos does. I tried this on some TPU covers I made for the wheels. It stuck and dried well, but when I actually drove it around, all of the coating came off the wheels in about 15 seconds. How should I make the silicone sealant adhere better to TPU? Better yet, are there any other ways to increase the traction of my TPU wheels? [Waltham, Massachusetts]
A: Mark J. Silicone sealant simply does not bond well to some types of plastic. You can solve this by adding a layer of material that bonds well to both the TPU and the silicone. I've had success using a thin application of a polyurethane-based adhesive like 'Gorilla Glue' to bond a strip of cotton fabric to the TPU, then applying a thin silicone layer to the fabric surface.
Best traction starts with the selection of your specific TPU filament. The coefficient of friction and softness of TPU varies with the additives mixed in when creating the the plastic mix. Some are better for printing structural elements, and some will be superior for traction. I don't have specific recommendations, but this could be worth posting a question in the forums.
The only method I have for improving traction after the wheels are printed is a tip from RioBotz that applies to polyurethane in general. They recommend wiping the surface of the tires with WD-40 before a match, claiming that this chemically breaks some of the polymer bonds resulting in a 'sticky' surface. Worth a try...
Date marker: January 2024
Heavy Brazilian Wheels
Q: I'v seen what is called "Brazil wheels" on some combat robots like "Sawblaze" in battlebots. Do you recommend them for maximum grip? (Katsina, Nigeria)
What's going on with combat robots in Nigeria? In more than twenty years I've never had a single question from the region, but in the last month Ask Aaron has more than a dozen. I know that Nigeria has been involved in recreational robotics, but is there now a combat robot tournament? I'll answer no further Nigerian questions until I'm told what's happening.
A: Mark J. The combat 'Brazil wheels' used by several BattleBots teams are from RoboCore Tecnologia LTDA in Brazil. They are a single-piece wheel/tire made from vulcanized rubber with a small keyed aluminum hub. The wheels come in three sizes suited to hobbyweight thru heavyweight classes with prices ranging from $37 US to $72 US per wheel:
As noted above, the wheels are both expensive and heavy. Traction is good but not exceptional. The main appeal of the Brazilian wheels is their durability -- from the RoboCore website:
"COMBAT Vulcanized Rubber wheels are solid and have been developed to receive direct impacts and cuts, resist tearing and do not fall apart during combat. Maintaining the integrity of the mobility system. As they are soft, they cushion shocks and help save the gearbox and motor. This makes them perfect for projects with exposed wheels that can suffer direct impact."
Pouring Rubber
Q: I'm building my first beetle weight and I'm getting to the point where I need wheels. I'm planning to cast rubber in a mold but I've never done that. I was wondering what rubber to use. [Social Media]
Q: I recently purchased some 4mm ID Flanged Ball Bearings and 4mm shafts from Servocity. Both are from the same brand, but they don't fit. The ball bearings are slightly too small, I can get them partially on the shaft if I hit it hard enough with a hammer (I know, not the best idea). I already tried putting the shafts in the freezer, and that didn't work. What should I do to make them fit? [Waltham, Massachusetts]
A: Mark J. Freezing the shaft helps a bit -- warming the bearing helps more. Heat the bearing in boiling water (bearing should not be heated above 120 degrees Celsius) before quickly sliding it onto the frozen shaft. If a bit of force is required to adjust the position, a metal tube of suitable inner diameter may be placed over the supported shaft and against the inner race of the bearing to tap it into place.
Home Machinist Options
Q: AR500 and S7 weapons are all the rage, but AR will eat my little hobby mill for breakfast, and heat treating S7 requires more than a torch and a bucket of oil.
What are my 'next best' options that are easier to handle? This will be for insect class bots. [Social Media]
A: Mark J. It sounds like you want to machine a three-dimensional weapon such as a drum rather than a disk that you could simply order from a water-jet cutting service in the material of your choice.
Cheap and widely available 4130 'chromoly' steel is the home machinist's go-to substitute for exotic alloys. You can surface-harden chromoly using standard practices and when you're done you'll have a tough and hard weapon.
You might also consider machining an aluminum alloy spinner and insetting one or more water-jetted AR500 impactors in the fashion of the FingerTech drum pictured above.
Imitate Successful Robots
Q: Hi there, currently designing a featherweight robot and am in charge of material selection. Please could you help me with the steps I would need to take to calculate how strong/tough/hard the armour needs to be to withstand weapon attacks. (e.g. impact energy, energy stored, etc). [Sheffield, England]
A: Mark J. An engineering analysis of required strength must have assumptions on the magnitude and vector of the forces that will be applied to the structure. Given the wide variety of weapon types your robot may face and the unpredictable nature of combat, the armor on your robot will suffer impacts of uncertain magnitude from virtually any angle at effectively any point.
See FAQ #17 and this post in the Ask Aaron Materials and Components archive.
Date marker: January 2023
Holding in UHMW
Q: I'm designing a UHMW panel frame beetle and I wonder which is better, Plastite screws or heat set inserts with machine screws? [Winston-Salem, North Carolina]
A: Mark J. For panels you will be removing regularly, inserts work best as they do not lose strength with each assembly/disassembly.
For panels you do not plan to take back apart, Plastite screws into correctly sized pilot holes are great.
Not With Plastic
Q: I'm using Plastite screws to hold UHMW plastic panels for my chassis. Does Loctite Blue work with UHMW or does it have to be a metal on metal thread? If not, is there an alternative out there that people use? [Parker, Colorado]
A: Mark J. Blue Loctite #242 does not work with plastic and can even damage many types of plastic. Loctite makes a special threadlocker for use with plastic machine screw threads (#245), but self-tapping screws in UHMW won't vibrate loose. The plastic compresses against the threads and holds them securely in place, just like a Nyloc nut. If you've correctly sized the pilot hole you'll need no additional security.
A Different Saturn
Q: Do you have any experience with the SaturnBoxes from RobotMatter? There really is nothing on the website as to what kinds of motors they accept or what size pinon gear they require. [Roseville, California]
A: Mark J. The RobotMatter website is entirely useless. You can try to contact them at robotmatterllc@gmail.com, but the last I heard of RobotMatter was about a year and a half ago when builders were wondering where their orders were. The website does not appear to have been updated since that time. Proceed with caution -- I would consider other gearbox sources.
Update - A builder let me know that these gearboxes are designed to couple to RS-775 brushed motors, which means the motor mounting holes are in a 29mm diameter circle and drilled for M4 screws. Details on motor shaft length requirement and pinion gear specs may be found at AliExpress.
Please note that the RobotMatter SaturnBox is not the same as the well-documented and robust Ranglebox Saturn gearbox (archived). The Ranglebox is unfortunately no longer available.
Keepin' Wheels on a Drill
Q: I've been playing around with using drill motors and gearboxes for my 12lb but I'm running into issues with wheel mounting. I know tons of other robots have used these motors in the past, but I haven't been able to find much on how they actually attach the wheel to the 3/8" shaft. The closest I have been able to find were from Australian builiders who use "red wheels" which are really common in their area. Any tips to point me in the right direction would be greatly appreciated, thank you. [Chico, California]
A: Mark J. From time to time somebody will make up a batch of drill hubs that match the standard threaded cordless drill output shaft and press-fit onto the widely available Colson wheels. As drill motors have become less popular the stocks of those hubs (video) have dried up and have not been replenished.
Options:
If you can locate or drill out the bore of some suitable wheels to 3/8" you can simply clamp the wheel in place with a couple of washers and the reverse-threaded screw that comes with the drill motor (video). Not the best option; if the screw gets even a little loose the wheel just spins. Loctite is your friend.
Banebots offers a 3/8" plain bore clamp hub that is a very firm press-fit into the 29/32 inch bore Colson series 2 wheels. The Colson wheels appear to be hard to find in the full range of sizes at the moment.
None of these solutions are optimal but I don't know of other US options right now. I'd go with the BaneBots T81 hubs and wheels and add the reverse-thread screw + washer + Loctite as an extra safety measure.
Addendum - UK-based Team SC Robotics offers some useful parts for drill motor drive systems and they have a YouTube video on 'hot pressing' threaded inserts into plastic wheels.
Comment: Hi. Chris from Western Australia.
I have seen your question about those "red wheels" and I can say that I know where I can get them. We have a major hardware store chain called Bunnings, which is the same as Home Depot in the US, and B&Q in the UK. They sell those little red wheels all the time! They're just over $5AU each, which is about $3.75US.
If the person originally asking the question doesn't know anyone in Australia, I'd be happy to help. Because almost everyone on this site is seemingly anonymous, what can I do to get in touch with the guy?
Reply: Very kind of you to offer, Chris. Send me your contact info, I'll hold onto it, and if the builder from Chico sees this I will pass it on.
Q: When I went to Norwalk Havoc (as a spectator) I noticed a sawbot called 'Whittle by Whittle'. I happened to notice that this robot - as well as 'SawBlaze' on the rare occasion they use the saw - use a certain type of circular serration saw blade that differs from the common very-serrated design. The blade seems to be much flatter and stable, however it also seems to not be able to cut as quickly. Are there any reasons why different bots use these different saw design?
As always, Go Run Amok! [Worcester, Massachusetts]
A: Mark J. If you know specifically what type of material you'll be cutting with a circular saw you can match the saw blade design to that material and get an optimum cutting rate. The selected saw blade might have twenty teeth or a hundred and fifty teeth, and those teeth might be steel, carbide, or something more exotic. For some materials you might choose a blade made entirely from an abrasive ceramic.
If your're planning to attach a saw blade to a combat robot you're going to face some unusual challenges:
A wide list of very different materials you may need to cut into;
Poor control of the 'feed rate' of the material into the saw; and
Unpredictable and potentially damaging impacts to the saw blade itself.
The single best overall blade for this environment is a general purpose 'diamond saw blade' that consists of industrial diamond particles embedded in a carbide ceramic base that is then brazed onto a segmented-edge steel disk. It isn't the best blade for cutting rapidly into soft materials, but give it enough power and it won't 'jam' while carving thru any material all the way up to hardened steel. These are the cutting blades used by 'SawBlaze' and 'Whittle by Whittle'.
Very Different Properties
Hey, I just realized the sheet of UHMW I thought I bought is actually a sheet of acetal copolymer. I'm not too familiar with plastic properties, and I'm looking to make saifu kit-style rounded wheelguards. Is acetal copolymer a bad choice for something like that? [Philadelphia, Pennsylvania]
A: Mark J. There are very good reasons why builders use UHMW-Polyethylene for those Saifu-style wheel guards: it's light, slick, bends easily, flexes to absorb a lot of energy, and stretches rather than breaks. Acetal Copolymer (POM-C) has very different material properties:
POM-C is 50% heavier;
It's several times stiffer;
It's difficult to form; and
It's hard enough that it breaks before it stretches.
That makes POM-C a poor choice for bowed wheel guards. Buy some UHMW and save the POM-C to make gears, hubs, or internal mounts.
Not Gonna Update Them All
Q: Also, I noticed in your old Armor Guide you mention that 6061-T6 Aluminum and mild steel are both solid choices to hold up against spinners, but in your discussion with the "Xmas Viper Guy" you say that both these materials aren't worth our time. Have spinners just become too powerful for those materials in the time between those answers, or what's up? And if so, would it be worth putting out an updated Armor Guide so people don't make the mistake of using any other outdated materials from that guide?
Thanks for your time, man. [Philadelphia, Pennsylvania]
A: Mark J. Yes, spinners are MUCH more effective now than they were fifteen years ago when the armor guide was written, but I think you should re-read it. The guide states that mild steel and 6061-T6 aluminum are cheap and easy to obtain, but that other alloys are stronger. There's nothing about 'solid choices' or holding up to spinners. It also says that you should do your homework and:
Look at 'bots with designs similar to your own and use their experience as a guide to your own project.
That's the best timeless advice I can offer.
If I go back to the start of Ask Aaron and update one old question every day it will take me nineteen years to get back to this question -- I'll never catch up! The archives all have date markers every year or so to help readers judge the age of the question they're reading, but I can see the merit in posting a specific warning notice in the armor guide. I've added a note.
Best Unused Meme
Q: Im having trouble finding a name for my new beetleweight. I'd like to use a meme, but theyre all taken. What have I missed? [Houston, Texas]
A: Mark J. This name is perfect for a beetle and I haven't seen it used.
Q: I'm building a 3lb (beetleweight) overhead horizontal spinner [render attached]. Everything is enclosed within a box made of nylonx (carbon fiber infused nylon) and I'm looking at different materials for the top and bottom plates of the bot. These top and bottom plates aren't meant to be armor, but more structural components to avoid flex in the bot. I've looked into 2mm carbon fiber (about $20-30 per plate from cncmadness) and 1mm titanium ($50 per plate from sendcutsend).
I was wondering which one you think would work best and if there are other places I could get titanium CNCed or laser-cut. Thank you! [Arlington, Virginia]
A: Mark J. You're considering two materials with very different properties.
Grade 5 Titanium has properties that are useful for armor: high tensile strength, impact resistance, and springy toughness. But the structures you're fabricating are not intended to function as armor.
Generic Carbon Fiber (there are different types) has properties useful for structures that are not directly exposed to hard impact: a high strength to weight ratio, and very high stiffness. The structures you're fabricating are intended to be strong and stiff to limit chassis flex.
A 2mm panel of carbon fiber will weigh about 15% less than a 1mm titanium panel, but will be about five times as stiff and have nearly six times the yield strength. This makes it sound like an easy choice and I think it is -- but mounting carbon fiber panels requires special attention. Pan-head screws will work but do not over-torque them. The screws are tightened just enough to hold the panel in place without squashing the soft CF under the screw head. Oversize metal washers are an option. Do not countersink CF for flat-head screws!
I don't generally recommend specific shops for parts fabrication. I will say that SendCutSend has a good reputation among combat robot builders. If you'd like to take your chances there are many on-line metal fabrication shops you could try.
Date marker: January 2021
Q: Hi Mark, it seems like hydraulics are only used in heavyweights. I am wondering if you know of any lower weight class robots that make use of hydraulics? Maybe something that used parts from LESU/RC construction equipment? [Arlington, Virginia]
A: Mark J. Hydraulic robots are uncommon in any weight class because of weight, complexity, and fragility. Hobby grade hydraulic systems of suitable size for sub-light combat robots are designed to make scale model construction equipment operate in convincing and realistic slow motion (LESU Video). A LESU hydraulic actuator provides a maximum 110 pounds of force: control valves are too small, the pumps and actuators have very limited pressure capacity, and the system is both heavy and unsuited to combat shock loads.
Unless you're prepared to design, manufacture, test, and certify your own components -- like Team Whyachi does for heavyweight 'Hydra' -- you are unlikely to piece together an effective hydraulic weapon system.
Q: Apologies in advance if the hamburger is bad here but how would I go about mounting a brushless outrunner to a P61? I've only used 300 series motors before and the installation was pretty straightforward. Im not looking for specific help but more so a jumping off point in where to begin, thanks. [Los Angeles, California]
A: Mark J. The process is very similar to mounting a brushed motor. Here's a bare-bones description based on info from builder Emmanuel Carrillo:
Select a suitable outrunner with 25mm mounting bolt pattern and 5mm shaft. The Team Run Amok Brushless Motor Selection Guide will help. Propdrive outrunner motors are popular for the purpose: 3536 for hobbyweight or 4238 for featherweight.
Select a P61 gearbox with the RS-500 backplate and order a 700 series pinon gear. This gives you a 25mm bolt pattern and a 5mm bore pinion to match the Propdrive and other popular brushless motors. The RS-500/700 backplate also works; it has both 25mm and 29mm spaced mounting holes.
Cut the brushless shaft with a Dremel to 14mm from the face and press on the pinion. Mount the motor to the gearbox backplate and reassemble the gearbox. Don't forget to grease the gearbox.
You might also find Robert Cowan's video on preparing outrunner motors for robot combat duty useful: Battle Hardening Outrunner Motors
Mounting the brushless motor is the easy part. Setting up the brushless ESCs is where it gets tough. I'm sure glad you didn't ask about that...
Q: I've seen screws drilled directly into the UHMW frame instead of being attached via NutStrips. How can I attach screws directly to the frame like the robot in the picture? Do you need a hole tapper? [Arlington, Virginia]
A: Mark J.DO NOT tap machine screw threads into UHMW. Soft plastic requires screws with deep and widely spaced flutes to hold well. Many builders use commonly available wood screws for UHMW, but special-purpose thread forming screws for plastic are stronger and hold much better. Just drill the recommended size pilot hole to full depth and screw them into place. Available in flat or round head, they are well worth the effort to obtain.
Q: Hi, I'm currently designing a 3D printed ant weight (US antweight mind you, 1LB/~450g). I was planning to use NylonX/NylonG for the chassis, however I recently came across Markforged and their continuous Carbon Fiber printing which claims to be approximately equal to 6061-T6. I have been able to find a local rapid prototyping shop which can print with this material for a small price (more expensive than printing it myself with NylonX though).
I looked on your website and similar sites to see people's experience with this material in combat robots but I haven't seen any solid details. Most deal with regular chopped CF Nylon Onyx version which is similar to NylonX, not the continuous fiber version. Are you aware of any ant/beetle weight (or even larger) bots that make use of this material? [Arlington, Virginia]
A: Mark J. The Facebook Robot Combat group has an active and opinionated corps of combat chassis printers. Some members there have used continuous fiber reinforcement in printed insect chassis -- but the preferred fiber material is Kevlar over Carbon for it's better combination of strength and impact resistance. One of the members is a Markforged employee who had this to say about reinforcing a Markforged Onyx beetleweight robot chassis with continuous fiber:
Markforged guy here -- Onyx is mostly Nylon 6 so it's pretty impact resistant in general. The chopped fibers don't add much to strength (they're mostly for printability) so if you're looking to add impact resistance/strength past the base Onyx with continuous fiber I'd suggest looking at reinforcing those prints with our Kevlar filament. It's much more energy absorbing than the Carbon Fiber, while still adding a good deal of strength.
Short fibers add max 1.5-2x UTS over virgin nylon 6 or maybe 1.25-1.5x vs ABS, whereas by adding continuous fibers you're looking at 13-15x UTS for FG/Kevlar and 23x for Carbon Fiber. At that point though you need to look into Izod impact test results too.
If you'd care to join the Facebook group, I'm sure the printers there would like nothing more than to discuss fiber, infill, drying nylon, base temperature, and all the other variables to consider in printing the ultimate insect chassis.
Q: What's the difference between Banebots' Sport Gearboxes vs their P61's? [Lincoln, California]
A: Mark J. The BaneBots 'Sport' gearboxes are designed for FIRST Robotics Competition (FRC) builders. FIRST robots may weigh as much as 150 pounds, and the gearboxes may be subjected to destructive stalling at high torque loading -- something uncommon in the drivetrains of combat robots.
Specification
P61 20:1
Sport 20:1
Weight
8 oz
15 oz
Length (box only)
1.9"
2.115"
Height/Width
1.5"
1.875"
Shaft Length
1.5"
1.0"
Shaft C/S
0.5" Round
0.5" Hex
Shaft Key
0.125"
N/A
Max Torque
45 ft-lb
110 ft-lb
Price
$45.90
$66.00
Compared to P61 gearboxes of the same reduction ratio, the 'Sport' gearboxes are a little larger, a lot heavier, and can survive much greater output torque loads. The lighter weight and longer shaft of the P61 makes it a better choice for use in combat robot drive trains, but the Sport gearboxes may be useful for combat lifting or clamping weapons.
Note: Some ratios of the Sport gearbox are available in a "heavy duty" version that increases max torque output from 110 ft-lb to 140 ft-lb -- see the BaneBots website for additional information.
Q: I had a proposal for multi-layer armor: 3/16" titanium on top with 3/16" kevlar underneath. What do you think? [U.C. Irvine]
A: Mark J. It's tempting to think that layering dissimilar materials might make a composite that has the strengths of each of the materials. What you generally end up with instead is a composite that accentuates the weaknesses of each of the materials, particularly when the materials used do not share similar stiffness.
Search this archive for "composite armor" to find multiple discussions on different types of layered armor. My general advice is to avoid the practice.
Q: Does UHMW plastic have the same "wedginess" capability as a metal like steel or titanium? I want to use UHMW for my insect bot's wedgelets as titanium/steel is a pain to machine. I only have access to small hand tools. [Bellflower, California]
A: Mark J. If UHMW was a good wedge material you'd see it being widely used in this type of application -- but it isn't. UHMW has many useful attributes but it is very soft. A hard (and possibly sharp) metal weapon impactor will dig in and 'grab' the soft surface rather than slide up the wedge and deflect. Not what you want.
Now, you could screw mount a nice wide UHMW wedge to either side of your weapon support structure and 'clad' the impact surface with a strip of hardened steel or titanium. The UHMW would be light, energy absorbing, and easy to mount -- while the hard metal strip would be efficient at deflecting weapon impacts.
Q: How long do I have to wait for blue Loctite to dry before it gets good locking strength? When I tighten down a nut and then put a drop on the exposed threads it stays wet for a long time. [Salt Lake City, Utah]
A: Mark J. The correct usage of tread locking compounds like Loctite is to apply a small drop to the clean screw/bolt threads before you spin on the nut and tighten (video). Anaerobic threadlockers like Loctite cure when confined in the absence of air between close fitting metal surfaces. Applying a drop to an assembled screw and nut does not provide these conditions. Properly applied, blue Loctite produces a fair bond in 20 minutes and a full cure in about a day.
Q: The RTV silicone rubber I've been applying to my foam tires for better traction works well but keeps coming off in chunks. Is there something I can do to get the silicone to stick better? Should I switch to liquid latex? [The Panhandle]
A: Mark J. If the silicone rubber is coming off in 'chunks' you're putting it on too thick. Clean the foam tires vigorously and thoroughly -- I use lighter fluid and a rag. Allow to dry completely. Apply pure silicone sealant to the tire surface and squeegee the sticky goo around the circumference with a popsicle stick or knife blade, applying very firm pressure. The silicone layer should be no thicker than a coat of paint and the texture of the foam should show thru. Wipe any excess from the tire sidewalls with a rag. Allow to cure for several hours (or days) before use.
I prefer silicone rubber, but many builders use liquid latex 'skin paint'. The technique is to first coat the tire with craft rubber cement. When the rubber cement dries you apply a couple coats of the latex.
Q: Hey Its me from Anacortes again. I've been having traction issues lately with my Beetle weight wedge. I seem to have three options: use magnets, make my tires more sticky, or use wider tires. Magnets obviously have disadvantages, such as getting stuck to the floor or other robots. I was thinking of using carpet tape around my wheels like Robert Cowan's "Psychotic Break," but I don't know if the stickiness would last all three minutes, especially in a dirty arena. Wider tires is also an option, but they would be much heavier and more expensive than the Fingertech wheels and hubs I'm using now. Not to mention the width of the tires would make them hard to protect, and more vulnerable to spinners.
So in your opinion, what would be the most viable option? [Anacortes, Washington]
A: Mark J. Great traction is something best designed into a 'bot from the start. I don't know the layout of your wedge, but you may be able to shift some components or change wheel placement to get optimum weight on the drive wheels. See section 2.7.7 of the RioBotz Combat Tutorial. This isn't usually a problem for 4-wheel drive 'bots.
If it's too late to consider radical design revisions, we can look at some 'fixes'.
Magnets The usual problem with magnetic downforce is that it's overdone. A couple of small chassis-mounted magnets positioned very close to the wheels can give a significant traction boost without turning the whole 'bot into a magnetic hazard. Just a pound of downforce on a beetle can make a big difference -- if you want to experiment.
Sticky Tires The carpet tape on 'Psychotic Break' was a desperation attempt to adjust for the poor weight distribution on a big horizontal spinner. In a dirty arena the crud would build up VERY quickly and render the traction worse than it was to start with. A more conventional approach is to coat foam tires like yours with liquid latex or silicone rubber. This doesn't actually make them 'sticky', but does provide a surface with much greater 'grip' than the foam. See this post lower down in this archive.
Wide Tires switching to wider tires does not generally provide better traction. See this post farther down in this archive for an explanation.
My suggestion is to try a latex or silicone coating on your tires and clean them with alcohol and a rag before every match. If you decide to try magnets, keep them small and close to the wheels.
Q: Set screws on my insect-class robot hubs are driving me crazy. They won't hold!!! All I've got is hand tools. Is there anything I can do to make my wheel/gear/pulley hubs more reliable? [Social Media]
A: Mark J. The tiny set screws as supplied with small hubs are generally inadequate to reliably hold against the forces imparted by robot combat. Exotic clamping/splining solutions that can eliminate the problem require custom machining. But don't despair -- it is entirely possible to massively improve the reliability of set screw hubs using only hand tools. Follow along:
Enlarge and tap the screw hole. Go big. A screw even a bit larger in diameter than the shaft is appropriate.
Grind or file a WIDE flat on the shaft. Not a divot, not a hole -- a flat. Grinding away as much as half the shaft is not too much if your screw is that wide.
Install a flat-bottom set screw -- not a 'cup' or 'cone' tip. Grind one flat if you must.
Buy a good quality hex key (Allen wrench) to properly torque down the screw. A good tool here does make a difference.
Loctite! If you've done the steps above, the standard blue Loctite thread locker is fine. A drop or two on the set screw threads before assembly will do. If you're trying to short-cut the list with just a standard size flat-bottom screw and a narrow flat on the shaft, blobbing nasty red threadlocker on the shaft and screw before assembly may help... a little.
Q: Hey, I'm not to sure if this has been asked, but how I should go about heat treating my s7 weopaon? [McAllen, Texas]
A: Mark J. It's not practical to heat treat S7 tool steel in your home workshop. Heat Treating S7 is a multi-step process requiring precise temperature control up to 1750° fahrenheit with carefully monitored heating and cooling rates. You need a specialized, fully instrumented furnace plus experience in the art. Backyard 'hillbilly' metallurgy will simply turn your weapon into a warped, brittle, useless piece of scrap.
Find a commercial heat treating company nearby (like Texas Heat Treating in Round Rock) and explain what you're doing. They just might be BattleBots fans and be willing to slip your little piece in with a larger commercial order.
Q: What is the chamfer angle for countersinking the screws that fingertech sells? I couldn't find it on their website, and I want to make sure I'm using the right bit. [Oak Harbor, Washington]
A: Mark J. Non-metric flathead screws typically have an 82° head angle, but 90° and 100° are out there. I could ask FingerTech for you, but I hate being the middleman. Email: sales@fingertechrobotics.com
Update - Builder Nick Polanosky confirms that the FingerTech flatheads are 82° head angle. Thanks, Nick!
Q: The foam tires on my antweight don't get much traction and I'm being out-pushed. I've heard about coating the tires with latex for better grip. How do I do that? [Wilmington, Delaware]
A: Mark J. Do a web search for 'liquid latex' -- it's available at many 'party' stores as Halloween makeup. Clean your tires with alcohol or lighter fluid on a rag and let dry. Brush a coat of liquid latex onto the tire surface and let dry overnight. A second coat is a good idea.
Silicone coated foam tires on 'Algos'
I prefer pure silicone rubber sealant as a traction coating for foam tires. It's available at hardware and automotive stores. Clean the tire as above, then smear a thin coat of the gooey silicone onto the tire with a popsicle stick. Wipe away excess from the sides of the tire and let cure a full day before use.
Q: not a question but to add on to what you said about liquid latex on insect wheels: adding a layer of rubber cement before applying the latex makes the latex come off in chunks with the foam instead of it all coming off in one piece. there have been several instances where latex coatings have gotten entangled in spinners. while there hasn't been a ban on them yet, it's a good idea to take extra steps so that doesn't happen. [Philadelphia, Pennsylvania]
A: One of the reasons I prefer silicone coating is that it's much less likely to peel off in long, entangling strips.
Q: What's the best adhesive to bond rubber to metal? [The Aether]
A: Mark J. Run down to your local auto parts store and grab a tube of '3M Super Weatherstrip Adhesive'. This stuff was developed to bond rubber weatherstripping to metal and it works very well. I'll warn that it's solvent resistant and can be a real pain to scrape clean from the metal and rubber surfaces should you choose to attempt to remove it.
Application:
Clean the rubber and metal surfaces with a solvent and let dry.
Spread a THIN layer of adhesive on the rubber and metal bonding surfaces. Position while 'wet'.
Fully cures in 24 hours.
The adhesive comes in two colors: yellow and black. I've always used the original yellow and I've been told the yellow is stronger but that the black is easier to spread; the yellow is a little stringy.
Q: Hey It's me from Anacortes again. The development of my robot has led to a couple more questions. Shortly after I designed a major component of my robot around 2.5 inch fingertech foam snap wheels, they went out of stock. I signed up for them to notify me when it gets back in stock, but I don't know if need to start looking for an alternate wheel solution. By now over half of the snap wheels are out of stock. Has this happened before?
A: Mark J. Yes, they go out-of-stock from time to time. The 2.5" Lite Flite foam tires will fit the FingerTech snap hubs. They're just a touch wider (0.035") than the FingerTech tires, but they're in stock and work well.
Q: Also, I was wondering about the dimensions of medium nutstrip. All of the sites I can find online say that the threaded holes are spaced at 14.5 mm intervals. Is that measurement referring to the space from the center of each hole, or from the closest edges? [Anacortes, Washington]
A: The hole spacing is measured center-to-center.
Date marker: June 2019
Q: All of my bots have been made of HDPE from 5 to 20mm thick, cut with a mixture of a handsaw, a jigsaw, a chop saw, and a circular/skil saw. I notice however with making curved cuts, the resulting cut tends not to be right-angled, getting more and more drastic the further you go up in thickness. The jigsaw gives cleaner finishes but bends more often, and the hacksaw gives squarer finishes but tends not to curve as well and gives a rougher finish. Do you have any tips for getting cleaner curved cuts with plastics like HDPE/UMHW that don't involve machining?
A: Mark J. Given your selection of tools, I think the jigsaw is your best option. Several tips:
Buy a brand new blade for your jigsaw and use it only for soft plastic.
Several manufacturers offer special blades for soft plastics that reduce heating and make for smoother cuts -- example.
Blade tooth count: about 10 TPI works well for HDPE.
For tight curves: rough cut about a centimeter from your final cut line, then come back with a second cut to trim away the thin edge.
A little wax on the blade helps reduce friction and heating.
Try lower blade speeds, and keep the material moving.
A little work with a sanding block can remove any troublesome irregularities.
Q: So, recently BaneBots released their new set of compliant wheels and I'm very curious as to what they do differently than other wheels and am fairly confused about the concept. Could you give any insight to the pros and cons of the compliant wheels vs their normal wheels? [Altoona, Pennsylvania]
A: Mark J. You may have noticed the popularity of thick, foam rubber tires in small combat robots. The thick foam absorbs a great deal of a spinner weapon impact before it can be passed on to damage the drive train. Their down-side is relatively poor traction -- a layer of latex or silicone rubber applied to the surface of the foam rubber improves traction greatly.
The new 'compliant' wheels from BaneBots are constructed with a small wheel hub and a deep tire made of a high-traction compound in a 'cut-out' pattern that allows it to deform to absorb impacts. In theory, this construction will combine the best qualities of the regular BaneBots wheels and the 'Lite Flite' style foam wheels. In practice... well, we'll need to see how well they do in combat.
Note A builder on the on-line forums reports that there is a lot of variation in the 'squishiness' of the compliant wheels, even within the same size and compound. There may be some production consistency problems. Stay tuned.
Q: How to adjust the motor shaft to colson tires [Guayaquil, Ecuador]
Q: When I was looking through pictures and build reports of insect weight robots, and I noticed that some builders use these orange belts that apparently can be cut to size and melted into a loop. In the picture I attached, you can see in use both on the weapon and drivetrain. Where can I find a belt like this, and what sort of applications do you recommend it for? [Oak Harbor, Washington]
A: Mark J. You can find this material with a search for "urethane round belt". Industrial supply dealers like Grainger have a range of sizes and properties in stock. There are multiple videos on how to cut and weld the urethane into a belt -- here's a start: Making Urethane Belts.
Unlike V-belts or timing belts that have very little 'stretch' because of internal fabric reinforcement, urethane round belts stretch a lot and must be cut short to have enough tension to transmit power. Think 'big rubber bands'. They will lose elasticity over time and should be monitored to assure adequate tension for power transmission.
Pulleys for round belts are difficult to find is sizes and bores useful to insect-class robots. Most builders using round belts machine their own pulleys.
The elasticity and ability to 'slip' make round belts a good choice for spinner weapon drives. The elasticity offers some isolation of the weapon motor from impact shock, and the slippage can smooth out current spikes at start-up. For drivetrain use I prefer timing belts for greater slip-free torque transmission.
Q: Hi, I'm currently designing a beater bar for a 15 pound robot and have been looking into hardening for the new design this year. I have heard horror stories of hardening too much and having wepons break easily from other teams. Is there any good way to determine how hard I should go reasonably? I'm planning to use either an S7 tool steel or a 4140 Chromoly. Thanks! [Punxsutawney, Pennsylvania]
A: Mark J. Congratulations! You've won the prize for opening the Biggest Can of Worms this week. Where to start... where to start...
The balance between metal hardness and impact toughness is a very complex issue that's further complicated by different methods of adding hardness. For example, 'case hardening' is a technique that hardens the surface layer of the steel but leaves the core material tough and resilient, while 'through hardening' effects the entire piece. Add to this the differences in the native hardness/toughness of differing steel alloys and you're quickly down the rabbit hole.
If you'd like to dig into some of the detail around this quandary, download this PDF on Balancing Wear, Strength, and Toughness. If you're just after a number, read on...
A key part of the hardness/toughness problem is in the design of your beater bar. Sharp internal angles and poorly placed holes create stress risers that are starting points for fractures. If your design is poor the piece will be more prone to shatter than a similar piece with more careful design -- so the first order of business is to clean up your design.
The question of 'how hard' then depends on your selected alloy:
'S7' tool steel is classified as a 'shock resistant' tool steel, and since slamming your beater bar into your opponent certainly qualifies as mechanical 'shock' your mention of S7 as a possible material is a good choice. Based on actual arena results, the best balance of hardness and toughness on robot weapons - with careful design to remove stress risers - comes at about 54 Rockwell 'C' hardness.
'4140' chromoly is widely used for spinner weapons and impactors. The chart on the right shows the relationship between hardness and toughness for 4140. You can see that toughness greatly increases as hardness falls below 50 HRC. Experienced builders stay at or below 48 HRC. For a highly stressed beater bar I'd drop down a bit farther to 42-44 HRC.
Note: S7 tool steel at 54 HRC is more than four times as impact tough as 4140 chromoly at 48 HRC. It is worth the extra expense.
Q: Hello, I have a few questions about belt idlers because I dont quite understand exactly how they are supposed to work but I hear they can help significantly with belt tension. I'm looking at finding a way to make them work in a 15lb bot for both weapon and drive but don't really know the basics of how they work.
Can you give any insight as to what they actually are and possibly some suggestions on how to get working on an implementation of them? Thanks! (P.S. The weapon is a vertical spinner driven by a singular timing belt, Felt the need to clarify) [Altoona, Pennsylvania]
A: Mark J. The distributor of your chosen timing belt and pulleys will likely have an on-line pulley and belt calculator to assist in the selection of pulleys and belt that will provide your desired speed reduction at your desired distance between the centers of the two pulleys. Example: FingerTech Pulley & Belt Calculator.
If the pulleys and belt recommended by the calculator are available, you will need no additional tensioning hardware to have a properly functioning belt drive system. Most combat robots using timing belts for spinner weapons or propulsion use no tensioners.
If you cannot obtain pulleys and belt that match your design requirements or if your construction technique cannot guarantee precision in the distance between pulleys, you may need to go with a slightly longer belt and a method to take up the excess 'slack'. One method of adjusting belt slack is to employ an 'idler' wheel on an adjustable mounting that presses against the outside of the belt to make the belt path slightly longer.
I recommend that you design for and find pulleys and belts that require no idler to achieve correct belt fit. An adjustable idler adds more failure points to your drive system, as well as additional weight.
Q: Do you think it is practical to add an idler that can be used in the case that something happens like the chassis gets tweaked and you loose tension on the belt? Or is it not worth bothering with? [Martinsburg, West Virginia]
A: Mark J. Timing belts have a fairly large tolerance for slack. Big 'bots with long belt runs and/or 'bots with belt types with less slack tolerance (V-belts, round belts, flat belts...) may require a simple tension adjuster -- but the question here is about timing belts in a 15-pound 'bot.
A spring-loaded 'automatic' tensioner won't stand up to the huge shock-loads on either weapon or drive systems. You'll suffer many more failures from the auto-tensioner than it will prevent.
Some builders like tensioners and some don't. I'd rather spend weight to make the chassis less 'tweakable' than spend weight on a 'just in case' adjuster.
Carry a size smaller belt in your spares kit. If you get in bigger trouble at an event it's possible to bodge an emergency 'ghetto tensioner' to get you thru the next match.
Q: what flavor of Machine screws are best for a battle bot? (GR 8/alloy steel, Titanium, stainless) specifically what is needed for holding armor on?
Is harder always better? [Hagerstown, Maryland]
A: Mark J.
Machine screws / bolts are designed and rated to resist a 'pull' force that is tested by a machine that applies a gradually increasing force. That type of strength is important in many applications, but it is not the type of load fasteners will face when holding combat robot armor. Forces encountered in combat are typically sudden 'shock' loads that may have a high 'shear loading' factor. Ideally, mounting should be designed to prevent shear load on bolts, but combat impact vectors are unpredictable -- you need to design for all possible loads.
The desired material and temper of the bolts depends a great deal on the armor mounting style, but there are some general considerations. Grade 8 bolts are strong, but their added hardness results in a lack of 'toughness' needed to survive shock loads. Stainless steel fasteners have much greater toughness, but are not nearly as strong overall. Titanium falls in between, but the added expense and bother far outweigh any advantage. What you most commonly see in use are standard grade 5 steel bolts: greater strength than stainless and greater toughness than grade 8. The loss of strength can be made up by adding a few extra bolts.
If your bolt heads are exposed to possible spinner attack, you'll want to countersink the heads to prevent the spinner from grabbing exposed 'spinner bait' and tossing your 'bot and/or shearing the bolt heads.
You might also be interested in searching this archive for 'shock mount'.
Q: I've had difficulty sourcing tool steel for my beetleweight bar spinner, so I've been looking into methods to harden mild steel. Have you heard of Robb Gunter's "Super Quench" method? It sounds like you can get a good facsimile of tool steel out of mild steel fairly easily (well, as easy as other home blacksmithing techniques anyhow).
Have you heard of this method, or do you know of any teams who have tried this? Would it be effective for a bar spinner? I think I'm going to give it a shot, unless I hear a good reason not to. [Mark from Vancouver - again]
A: Mark J. What do the things in this list have in common?
Apricots cure cancer.
Global warming is a hoax.
Chain letters are like free money.
Goat pheromones will make you irresistible to women.
Elvis is alive in a nuclear submarine under the polar ice cap.
Detroit suppressed a device that attaches to your car's air filter and doubles gas mileage.
Hillbilly metallurgy is awesome.
Give up? They're all things that you'd really like to believe are true but absolutely aren't.
There's a long list of desirable and required metal properties for spinner weapons, and if Billy Bob's mystical backyard hardening provided a reasonable mix of those properties you wouldn't have to search the back alleyways of the internet to find out about it. Don't waste your time.
Tool steel and abrasion resistant steel are fine spinner materials, but if you can't lay hands on them a nice bar of 'cheap and widely available' 4130 steel (AKA 'chromoly') is your go-to substitute. You can harden chromoly using standard practices and when you're done you'll know what you've got.
A little more about 'Super Quench'
The lower the carbon content of steel, the faster the cooling temperature drop has to be in order to create the crystalline structure needed to harden that alloy by heat treating. 'Mild steel' has a very low carbon content (0.05% to 0.30%) and is generally not hardened by heat treatment because the techniques needed to chill mild steel quickly enough to achieve barely significant hardening are simply not worth the effort. It's ever so much simpler and more productive to start with a higher carbon alloy.
So far so good, but then some backyard metal bangers dredged up work done by a metallurgical researcher who was able to add a very little heat hardening to "unhardenable" mild 1018 alloy steel as kind of a parlor trick. The internet has built this 'super quench' mild steel up to mythical proportions, touting it as a substitute for tool steel. In truth, the stuff isn't even a match for common low-alloy steels.
Q: Do you know if BaneBots P60 gearbox's gears are interchangeable? I have a 4:1 that I want to change to 5:1. What would I need to make this work? [Hagerstown, Maryland]
111
A: Mark J. Yes, you can turn the 4:1 P60 into a 5:1 P60. Parts cost is about $25 - shipped.
The planetary gears and carrier plate just slide out when the gearbox is opened. Demount the motor and use a gear puller to take the old pinion gear off. Take care in pressing the new pinion onto the shaft. Reassemble the gearbox with fresh grease and you're good.
Q: Apparently there is no 5:1 pinion for a 5mm shaft, Any ideas?
A: A few...
Scour the 'net for a gear with these specs:
Number Teeth:
11
Gear Specs:
0.6 Modulus, 20 Pressure Angle
Installation:
Interference (press) fit
Bore:
5 mm
Make friends with a good machinist willing to bore out a 3.2mm pinion to 5mm.
Drive over to your local R/C hobby shop and dig thru their gear bins.
Q: Hi Mark, is a threaded round standoff generally usable as a dead shaft for an antweight vertical spinner? I am not sure how much force the weapon shaft has to take. After looking at the tensile strengths, a 1/4" aluminum standoff has 45,000 PSI tensile strength, while a 1/4" stainless steel standoff has 80,000 PSI tensile strength.
I am wondering if there is a standoff that is usable, and why the stainless steel standoff has a higher tensile strength. Thank you. [Bellevue, Washington]
A: Mark J. Designing a combat robot certainly would be much easier if you could look up a single material property for an item to determine its suitability for a broadly defined application. Unfortunately, that isn't how it works.
Check Frequently Asked Questions #17 for an explanation of why I genuinely cannot answer your question with the information you have provided.
Tensile strength is the ability of a material to resist a 'pull' force -- as opposed to a 'push' force or a 'bend' force or a 'shear' force or an 'impact' force. It tells you very little about the suitability of a material to perform the function of a shaft in an un-dimensioned weapon only broadly categorized to a weight class.
'Standoffs' are little more than convenient spacers for mounting components in cabinets or panels. They are not designed or intended to be subjected to large structural loads, and the materials from which they are made are selected accordingly; they aren't 'strong'.
The '18-8' stainless steel standoff has a greater tensile strength than the unspecified aluminum alloy standoff because food-grade stainless steel has greater tensile strength than generic aluminum alloys. There are a great many different steel compositions with wildly different properties, and the same is true for aluminum. As noted above, 'standoffs' aren't made for strength as much as they are to meet corrosion, weight, or electrical specifications.
What you're looking for in a weapon shaft is a solid rod of 'tough' steel intended for a similar purpose -- a carbon steel drive shaft could be a good choice. Diameter will depend on your design parameters for both shaft support and weapon energy level. Start with what successful robots with similar weapon designs are using. If it breaks, make it stronger.
Q: What type of screws have the best hold in UHMW polyethylene? Can I tap threads and use machine screws? [Hershey, Pennsylvania]
A: Mark J. Depending on your specific needs, you have multiple options:
The popular solution for structural joints is wood 'deck screws'. The coarse threads hold well in soft plastic. Drill a pilot hole and run 'em in.
Specialty 'Plastite' screws are great in firm plastics, but are harder to find and may not be worthwhile for soft UHMW.
Polyethylene is poor at holding fine tapped threads. If you want the strongest possible hold with machine screws you can cross-drill and insert cross-dowel barrel nuts. This is way too much effort for a small 'bot, but might be handy for larger builds.
There are threaded inserts to drive into soft plastic that then take machine screws. They're useful for screws that must be removed frequently.
Q: So I heard from somewhere that 'Tombstone' had carbon armour but from somewhere else that he had metal armour. Which one is true? Thanks! [Turks and Caicos Islands]
A: Mark J. Builder Ray Billings doesn't much believe in armor. I'm not sure you should even call the thin panels that stretch over Tombstone's old-school tubular chassis 'armor'.
Non-BattleBots versions of his big spinners use thin aluminum or Lexan panels, but out of concern for arena hammers and saws the 250-pound version has titanium panels top and bottom. The black side panels are painted -- not carbon.
Q: Is there any history of horizontal spinner bots, large or small, using a slip clutch on the weapon bar to minimize stress on the motor/axle? It seems to me that *some* rotational slippage of the weapon would be acceptable if not even desirable, as during an impact the energy released is built up from the momentum of the spinning bar itself rather than the force being immediately supplied by the motor.
I was thinking of something maybe even like maybe a rubber tube that slides over the axle then a clamping hub is mounted around that, the rubber might provide some give. No ideas set in stone right now, just shopping around possible ideas. [Ballwin, Missouri]
A: Mark J. Some form of slip clutch is very common in all types of spinner weaponry, but it's rarely located at the weapon/shaft interface. Radial and axial impact loading at that location is much greater than the torsional loading on the axle -- great enough to destroy most clutch designs.
The most common way to get some impact slip protection for the motor is to use a round or v-belt drive to the weapon. The inclusion of a belt tension mechanism allows for adjustment of the amount of slippage: tight enough to keep the spin-up quick, loose enough to slip on a big impact.
Larger 'bots may use slip clutches from industrial equipment or a clutch of the builder's own design. I've used automotive clutch material squashed between jumbo washers with lock nuts and spring washers. Other builders have tried clamping hubs on finely polished shafts with collars above and below for location. Lots of designs are possible. A web search for 'torque limiter design' may give you some ideas.
Q: I think the torque limiter might be too complex (read: heavy) for my application (antweight). I guess that's not really a question so much as a statement, so here's my question, what sort of slip mechanism if any would scale down well to my weight class?
A: You did ask about "large or small" applications. If you'd specified 'antweight' I could have tailored a better response.
Insect class weapons typically isolate their motors from impact shock with belt drives. Custom pulleys used with round belts are effective at power transmission with a good slip response when the weapon is abruptly decelerated on impact. See the photo of 'Silent Spring' above. However, the small motors used in antweights are not generally sensitive to deceleration. Although they do not have much 'slip' capability, weapon drives with commercially available timing belts and toothed pulleys adequately protect antweight motors from impact shock.
If you're thinking about a direct drive weapon, the radial and axial impact loadings are a much greater concern than the torsional loading a slip clutch will deal with. Extreme reconstruction of the motor to include a much larger shaft and bearings is required for such an application. See this post in the Ask Aaron Robot Weapons archive for an overview of the preparation required. You may also search the Ask Aaron Ants, Beetles, and Fairies archive for "direct-drive" to find other posts on the topic.
Q: So I recently read in the material/components section that you like to put a pattern into Colson wheels. What do you use/do to carve this pattern? [Coudersport, Pennsylvania]
A: Mark J. I only cut a tread pattern into polyurethane tires if the arena surface is so greasy/dirty that the tires are picking up an unacceptable layer of gunk. The tread pattern helps the tire shed that gunk. I clean tires between matches with alcohol or lighter fluid on a rag.
My tool of choice for a safe and well controlled cut is an Exacto #13869 Pointed Blade in an Exacto #5 Heavy Duty Handle. Work on a firm surface and keep your fingers clear. It doesn't need to be pretty to be effective.
Q: So I saw that some robots have tank tracks so I was wondering what were the pros and cons of tracks vs wheels? Tysm! [M] [Lynn, Massachusetts]
A: Mark J. That's easy...
Pros They look cool.
Cons Everything else.
Tracks are heavy, vulnerable to attack, complex, unreliable, reduce turning agility, and most importantly have no traction advantage on the smooth hard surfaces where combat robots fight. 'Bite Force' (pictured) had experimental magnetic tracks at the 2015 ABC BattleBots tournament where the 'look' was important in getting accepted to compete on the show, but they were more trouble than they were worth and were replaced with wheels for the 2016 season. If you need a robot to fight on sand or in mud, consider treads -- otherwise avoid them.
A: Mark J. I checked with Will Bales about this. He says...
'Whyachi Killer' fought a marketing battle against Team Whyachi and lost due to manufacturing problems and a possible rules violation. Then the CAD design files were lost. Depressed, 'Whyachi Killer' made its way to the center of the Pensacola Bay Bridge and leapt off - only to land on the deck of a trawler bound for the Keys. After paddling a board into Islamorada, 'Whyachi Killer' found a job controlling a ceiling fan in a Conch Bar and saved every penny until it had enough money to open a small Margarita stand on the beach. It married a lovely girl named Mandi and had four children: a girl, two boys, and a rotary dimmer. The family is doing well.
Date marker: January 2018
Q: IF the only choice of a material to use for a combat robot was wood, which kind should one use and why? [Champaign, Illinois]
A: Just as you use different types of metal for different parts of your robot, so also would you use different types of wood in different places. Marine grade plywood would be useful for support structure in place of magnesium or UHMW polyethylene due to the uniform strength of the multiple cross-grain layers.
Trivia All of Team Run Amok's robots have at least one component made of wood as a tribute to our first 'bot, Robotica champion 'Run Amok'.
Q: If I were to use a shovel head as armor for a robot, what kind(s) of shovel heads should I look for? [Champaign, Illinois]
Q: Hi, is there a coating I can put on my 40A Bane bot T40 wheels so they don't pick up every piece of dirt and debris on the arena floor? [Great Falls, Montana]
A: Mark J. Sure, you can coat them with 65A Colson rubber.
More practically, anything you might coat them with to make them less 'sticky' will have an adverse effect on your traction. Clean the tires with a solvent before every match (I use lighter fluid on a cotton rag) and talk with the event organizer about letting you wipe down the arena surface a couple times during the tournament.
The RioBotz combat robot guide recommends carving a tread pattern into the surface of polyurethane tires like BaneBots for dirty arena surfaces. The edges of the tread clean themselves as the wheel slips. They like a 'Z' pattern -- I prefer a wide 'X' for smoother running.
Q: Hi again, I have a antweight combat robot that has a wedge leading up to a vertical spinner. The wedge is 1mm thick grade 5 titanium, and sits at a 40 degree angle, and screws thread into heat set inserts that are in the 3D printed chassis. The issue is that when I practice driving (with the weapon disconnected) I find that the cap screws are getting in the way of the dummy robot getting fed all the up the wedge. Is there anything I can do? [Great Falls, Montana]
A: Mark J. There are a great many types of screw heads, and you're using the wrong type. Take a look at the way the wedges are mounted on the very successful BotKits D2 wedge robots (pictured). You need to obtain suitably sized countersunk flathead screws and a matching countersinking bit that will make the beveled hole in your wedge for the screw head to set down into. There are videos and guidance articles on the 'net for countersinking thin metal that will get you started. Practice on scrap metal to get the technique before working on your titanium wedge.
Q: Hey, it's me! This time, I've actually got a serious question about bot building: when it comes to painting, is there a way to paint carbon fiber? I want to paint it a blue color, but I have no clue if you can even paint carbon fiber. What kinds of paints should I look for or avoid?
Don't worry. I was originally going to paint the drum and the sides as well, but the sides are UHMW, which is non-porous and can't be painted and if the weapon takes damage in battle, the paint could be a dead giveaway as to how much damage I took! Also, I know carbon fiber is a bit steep to be starting out with, but it's free and can be cut down to the dimensions to fit the Saifu Kit I decided to use! [Decatur, Illinois]
A: Mark J. Really? You want to take awesome carbon fiber composite and paint it so it looks like a sheet of plastic? You might just as well use the stock aluminum plates. I'd much rather show off the cool shiny metallic weave... but it's your bot.
Lightly sand the glossy surface with 400 grit paper to dull it and give the paint a good surface to grip. Wipe clean. Any acrylic spray paint (like Krylon) will do -- a light base coat, allow to dry (see instructions on can for 'time between coats'), then apply a second heavier 'gloss coat'.
I am a little worried about you working with carbon fiber. Cutting or drilling CF creates a highly irritating fine dust that is very nasty on eyes and lungs. Wear goggles and a dust mask rated for fine particulates, and don't cut it in the house! Cut edges are very sharp - wear gloves. Cut the pieces a little large and block sand to size to get good, smooth edges. More CF tips here.
Q: Hi, I have a tooth on a antweight vertical spinner that is 5mm thick, 30mm wide and 13mm long. Would O1 tool steel be suitable for this use? [Great Falls, Montana]
A: Mark J. Given only that information I really can't make a specific comment, Montana.
No competent engineer would spec material before knowing a great deal more about the design than you have told me. You didn't mention how the tooth is supported, the weapon speed, or the weapon moment of inertia.
It's poor engineering practice to specify dimensions for a heavily stressed part and then try to find a material that will survive in that application. Material and design must work together to perform a specific function.
I can say in general that tool steels are commonly used for weapon teeth, as are various grades of abrasion resistant steel. Shock resistant S7 tool steel is a common choice for its great toughness. Your O1 steel may be an adequate choice, depending on your design details. Remember that tool steel is only as good as the heat treating it receives. I'd suggest tempering O1 to no more than 60 HRC to retain toughness.
Q: Are mecanum (aka omniwheels) wheels bad [Madisonville, Kentucky]
Good and bad depends as much on how a component is used as it does on the component itself. Can you name a champion robot that used omniwheels? I can, but it used them in an unusual way. You'll find that application in your search of the archive.
Bottom line: if you want to look cool and impress other builders, go ahead and build an omnibot. If you want to win matches, leave them alone.
Q: Hi Mark. For a 15 lb robot that will be a square ram-bot driven offensively I was interested in an armor comparison I could not find in the archives. Section 2.6 of the Riobotz Tutorial talks about the difference in types of armor. Considering the weight class I figure a robot of said design will be beat to hell without shock absorption. Between pieces of ar400 would ceramic tile or soft rubber or foam be a better medium for absorbing shock? Would this be considered ablative armor and should it be securely, tightly fastened or loose?
Congratulations on breaking through 6000 questions, the community warmly thanks you from here in western Pennsylvania. [New Castle, PA]
A: Mark J. Thank you, New Castle. I hope 'Ask Aaron' continues as a useful resource for you and the other builders on the Allegheny Plateau.
Shock absorption is a too-frequently overlooked aspect of armor mounting. In combat robotics, layered armor has proven inferior to single-piece armor with rubber shock mounts. The photos at right show the front armor pods and rubber shock mounts used on BattleBots competitor 'Overhaul'. Properly sized mounts will be quite firm -- they will barely flex under the best pressure you can exert on the panel by hand.
A web search for 'vibration isolators' will find items similar to those used by 'Overhaul' in a wide range of sizes. This is reactive armor, not ablative armor. Torque them down snug, without play or slop.
If you really want to try a layered armor, a sheet of solid 'Buna-N' rubber between metal layers would be a good choice. Try about 3/16" rubber thickness for a 15 lb robot.
Q: I have a custom pulley i wanted to press fit to a 5mm shaft, the bore came back from the cnc shop at 5.3mm. How do i fit it without getting another cut? i've heard of loctite and shimming? [Ile-de-France]
A: Mark J. First, don't use that machine shop again. A just-passable machine shop will hit a critical bore to ± 0.03mm, and your guys are off by ten times that much. I'd reject it and ask them to try again, but that may not be an option for you. Solutions:
Loctite There are many different formulations of Loctite intended for differing purposes. Using the wrong type to fill so large a gap will most certainly result in failure. Loctite 680 retaining compound is intended to join cylindrical fitted parts with gaps as large as 0.38 mm and is rated for torque carrying assemblies like pulleys. It isn't cheap, can be difficult to find, has a 24 hour cure time, and does not provide a perfectly concentric fit. I'm not a fan of gluing a pulley to a shaft but should you wish to try, 680 is the correct formulation.
Shimming I think this is your best option. An aluminum beverage can is a handy source of shim material. The sides of a typical can are about 0.1 mm -- too thin for your purpose -- but the top and bottom of the can are enough thicker that you may be in luck. Roll your shim stock into a tube with a little gap, slide it into the pulley bore with enough sticking out the end to pre-fit over the shaft, and press away!
Knurling A non-hardened shaft can be knurl rolled to expand its diameter. Given that your machine shop botched the bore I don't think I'd trust them to properly knurl the shaft, but it is an option.
"Speed Knurling" I mention this only because some very poor craftsman may recommend it. You place the shaft flat on a hard anvil surface and strike it with a hammer to deform it and make it a bit larger in one direction. Please don't do this.
A properly shimmed shaft won't need any additional help, but some builders like a drop of standard blue Loctite on everything. It won't do any harm.
Q: Can you recommend a place where I can get the structural components for my ant? Could I just cut up a plastic cutting board and use that? [Sacramento, CA]
A: Mark J. You've told me nothing about your design, so I can't make specific recommendations on the materials best suited to your robot.
Plastic cutting boards are usually made of some grade of polyethylene or polypropylene. These plastics absorb a good amount of abuse by flexing, but the material is poor at deflecting attacks from sharp spinning weapons that can dig into their soft surface. Cutting board plastics are commonly used for side panels of the chassis, with stiffer materials (aircraft quality aluminum, fiber composites...) used for the top and bottom panels. Thin strips of polyethylene are also used for flexible wheel armor in small robots. See photo of the 'Saifu' antweight kitbot at right.
Take a look at our Materials Guide in the materials archive for some general comments on the properties of common robot metals, plastics, and composites. You may want to search or browse the entire archive for ideas.
If you're on a tight budget, a trip thru your local 'dollar store' or thrift store can be very rewarding. Cheap kitchen cleavers can be cut and shaped into good ant wedges, and you can likely find cutting boards there as well.
Write back when you can tell me more about your design and I may be able to make specific recommendations.
Q: Hey, it's the guy asking about the antweight again.
What I'm looking for primarily is material for the bottom plate of my bot which I can bolt my motors and other parts onto. The design is more or less a two wheeled box with a wedge and I have all the main parts minus the chassis. You mentioned using aluminum or steel for a bottom plate; can you reccomend a place to buy these materials? I can work out the grade and thickness myself, I just need some direction where to get some.
A: So, you know enough about metals to pick the right alloys and grades and you have enough engineering experience to determine dimensional requirements -- but you can't do a Google search for metal suppliers? Let me help you with that: try "metal suppliers sacramento california". The results show that you have a variety of local sources for materials. If you'd rather pay for shipping and order on-line I have a few suggestions:
OnlineMetals.com offers a good selection of metals and plastic in small quantities.
Grainger Industrial Supply sells metals and everything else that industry needs -- and they have an outlet in West Sacramento for pickup.
McMaster-Carr is a national industrial supplier that deals in raw materials and other interesting items. They have a good selection of Garolite composite material, which makes a very fine base plate material for small 'bots.
I'm entirely sure I didn't mention steel for a bottom plate -- that's a waste of precious weight in a location where other materials will do nicely.
Q: I have a heavily modded viper and I was wondering if a piece of 1 mm stainless would be good for the bot. We have no specifications except it holds up decks. How does that compare with average titanium. And if it wasn't obvious enough I am using it for an ant [Elkridge, Maryland]
A: Mark J. 'Stainless' is a designation for a steel alloy containing at least 10.5% chromium. The addition of chromium makes these alloys resistant to rusting, corrosion, and yes -- staining. Other materials in the alloy (nickel, manganese, molybdenum, aluminum, sulfur, titanium, carbon...) determine its physical characteristics: hardness, strength, toughness, malleability, machinability, and chemical resistance.
There are a great many steel alloys that qualify as 'stainless' that cover a very wide range of physical characteristics. The most common grade for purposes such as deck building is type 304. Compared to the usual grade of titanium alloy used for robot armor (Ti-6Al-4V) 304 stainless has about 1/4th the yield strength, 1/3rd the hardness, and 1/2 the toughness. It also weighs about 80% more. Let's just say that NASA doesn't build spacecraft out of 304 stainless.
Used for a wedge, it's gonna get bent up badly compared to other available alloys. 4130 steel alloy is currently popular for sub-light and insect weapons and wedges. It is hard, tough, can be heat treated for added hardness, and available in small quantities from internet suppliers at reasonable prices.
There are dozens of posts about titanium and steel alloys in this archive.
Q: I have 1 more spec. It took 2 nights to cut with a cutoff saw going at approximately 20,000 rpm
A: If you're not going to believe me when I tell you it's not good, why bother to ask me if it's not good?
I don't know how to convert units of 'Cutoff Saw RPM - Nights' into traditional material specifications. As I said above, stainless steel alloys are not made to maximize properties valued in robot combat armor. Feel free to try it, but it certainly isn't going to perform like grade 6 titanium.
P.S. - You need a new saw blade.
Q: I'm looking to build a compact bot with a robust, redundant, and reliable drivetrain. Long story short, given my size constraints, something like Whyachi's M3M would be too big for the design, but their planetary P3 would be perfect! This design's drivetrain would be composed of four individual systems, each with its own wheel, gearbox, ESC, battery, etc. Do you see the P3, or other compact planetary gearboxes for that matter, as a viable option for drive? [Lihue, Hawaii]
A: Mark J. Anything Team Whyachi makes is 'viable'. I'd give the wheels some impact protection, or at least use squishy tires.
Builder Orion Beach ('Skorpios', 'Electric Boogaloo'...) had some trouble with the P3 planet gears locking on their shafts under loading. He recommends polishing the gear shafts/bores and replacing the lithium grease with a high-pressure molybdenum disulfide grease. He also suggests supporting the output shaft with an additional bearing or bushing if you plan to mount the wheel directly to the output shaft.
Q: What kind of wheels are these? [photo of Brazilian robot deleted] Are they custom or got from someplace?
Does wheel selection have a huge advantage? Plus how do i reduce slippage? [Tamil Nadu, India]
You are welcome to search the archives for answers to your questions. There are a great many posts about tires and traction in this archive. Search for 'traction'.
Date marker: January 2017
Q: Hello, I am trying to build a Featherweight robot in my garage, but our budget is semi-tight, and we live on Cape Cod, I want to know where I can get some parts for cheap, like a surplus house or something.
Thanks and Sincerely- Mike K. [Hyannis, Massachusetts]
Q: Hello,
Do you know a site where I can buy pinions? I am trying to mount a motor with a 5mm shaft to a 72.3 gearbox.
(I'm the dude with a ton of grammar mistakes, I'm from Ohio.) (This will be my third robot.)
Thanks! [IP address: Orlando, Florida]
A: Mark J. You'd think that something small and apparently simple would be easy to find in the 'net - wouldn't you? Unfortunately, pinion gears are a problem.
Advice: don't try to order an internet pinion to match up with that gearbox. All you know is the motor shaft size you need -- the PDF doesn't give the required gear pitch, tooth count, or length. The number of 'wrong' gears you might find, buy, and throw away is mind boggling.
I suggest that you, the gearbox, and the motor visit your local R/C hobby shop. They likely have a box of assorted pinions under the counter that you can go thru to find something that works or that can be modified to work.
It may be easier (and possibly less expensive) to search eBay for complete gearmotors with a 5mm motor input shaft. Pull the motor, switch the pinion to the motor you want to use. and bolt the new motor to the gearbox. This is common practice when adapting a specific motor to a combat robot application. It saves a lot of trouble.
Q: [product name expunged] are unreliable [Ashburn, Virginia]
A: Mark J. Sez you. If you want to express unsubstantiated opinions get your own website.
Q: I've been taking classes for welding, and as I've been practicing, I've been thinking about translating some of those welding techniques into my future builds. I have a few questions regarding some design choices about welding:
1) I've learned that construction sites will lay a crisscross surfacing weld on their heavy machinery scoops, such as an excavator bucket. They do this to increase the surface hardness and to lengthen the life span of the component. I was wondering how well an anti spinner scoop could hold up if I were to put on a layer of weld and grind the surface flush. Would this make for a stronger anti spinner scoop, or would it not do anything?
A: Mark J. That's an imprecise, labor intensive, and unpredictable method of hardening a steel surface. Suggest you read up on the wide array of more standard hardening techniques. I think you'll get better results.
2) I've noticed that many builders when they weld will only do one pass. How come builders don't do multipass welds? [Oregon]
A: Multipass welds are only needed in very specific situations. There's a good discussion on when to use multipass at the Miller Welding Forum.
Q: Which metal should be good to be used as skids?? [Maharashtra, India]
Q: How are the chains and sprockets connected to each other in the Whyachi 2-stage reduction "gearbox"? I saw pictures of the inside but I don't get how it works. [Quebec]
A: Mark J. The Team Whyachi gearboxes are not chain and sprocket -- their various models use spur, bevel, or planetary gears.
Perhaps you're thinking of the AmpFlow 3-stage chain speed reduction unit?
I'll be pleased to explain, but I have to know which gearbox I'm explaining.
Q: I was talking about the AmpFlow, I am so sorry I got messed up. I just don't get how the reduction can be made by using 3 chains and only 2 axles.
A: Got it. The trick is that only two of the six sprockets are attached to the shafts.
The diagram at right is a cutaway section of the AmpFlow speed reducer box as viewed from above with the chains removed. The cyan sprockets are attached to the shafts and rotate with them. The magenta sprockets are attached in pairs to 'dead hubs' that spin freely on those shafts (bearings not shown). Functionally there are four shafts, but two are hollow and co-axial with the solid shafts. It makes for a compact package! Open up an R/C servo sometime; that gear train is very similar in design.
Q: And how is the first sprocket fixed to the motor shaft? With a key stock?
A: I don't have an AmpFlow box here in the shop to verify, but since the motor shaft has a keyway it makes sense to key the first sprocket to the motor shaft. The final sprocket and output shaft are machined from one chunk of steel.
Q: I've been browsing around, and for some reason I cannot find a hub that can connect a Team Whyachi M3R gearbox to a 5"x2" Colson wheel. Do you know of any or will I have to find a different wheel? [North Carolina]
A: Mark J. If you're paying $1400 for a pair of gearboxes I think you can afford to have Team Whyachi make a pair of custom hubs for your Colsons. Drop them a line and ask if they have a design on file -- I'd guess that they do. If not, sketch up a drawing and send it in with your gearbox order.
What are you building that can use just a 2:1 gear reduction with 5" wheels?? The M3 gearbox is a useable 7.14:1 ratio, but the M3R is only 2:1 and is usually used for weapons or with an auxiliary chain reduction -- not direct-driving a wheel.
Q: Well, I was going to use the TWM3Rs for a 250lb robot, but the guys on r/battlebots already let me know that they're not sufficient for drive. I've decided to switch to TWM3Ms
As for the hubs, I'd rather use off-the-shelf parts due to availability.
A: Building with whatever's available 'off-the-shelf' isn't going to get you accepted to ABC BattleBots. Best luck.
Q: how can i fix a big wheel on a live axle? something like hypershock or witch doctor would be great and even better if you could post a diagram
thx a lot fo all you are doing for this community.. we really appreciate it [Quebec, Canada]
A: Mark J. The connector between a shaft and a wheel is called a hub. The 'live hub' shown at right is made for a go kart but could work well for a large robot. The hub clamps down onto a 'keyed' axle to hold it in place and prevent rotation, while the four bolts pass thru holes in the wheel and the 'lug nuts' hold the wheel to the hub.
Off-the-shelf hubs come in a variety of sizes to accommodate specific wheels and shafts, but large robots often require custom-made hubs to meet their specific design needs.
Search down this page a few entries to find another post discussing large robot hubs, and there are a great many other posts about hubs in this archive.
Q: What material is biteforce mad of alum. titanium [West Virginia]
A: Mark J. Like most robots, 'Bite Force' has components made of many different materials: the frame is powder-coated 6061 aluminum plate, armor panels are 7075 aluminum, wedges and forks are a mix of AR400 and mild steel, and the spinner bar is S7 tool steel. There are optional armor plates available made of various materials. Titanium? None that I know of.
Q: Hey Aaron, I did some searching and couldn't find an answer to this one.
Robots with big exposed wheels like stinger, bronco, ect. have hubs that their wheel rims bolt to, what are the typical ways used that these don't just slide off the end of the axle? [Dublin, Ohio]
A: Mark J. There are multiple solutions, depending on design and builder preference. A wheel hub for a 'live' axle has two functions:
Prevent rotation of the wheel on the axle; and
Prevent lateral movement of the wheel along the axle.
Some large-bot builders prefer to handle these two functions separately with keyed shafts and hubs to prevent rotation and clamping shaft collars to control lateral motion.
Some builders are willing to trust hubs with simple set screws dropping into dimpled pockets in the shaft -- either with or without a keyed shaft. A threadlocker compound can help keep these tight. This is often the only solution available for small robots, but if you have another option - take it.
I've also seen C-clips in machined grooves used to retain hubs on keyed shafts, but not commonly.
Q: Hi,Mark its the 4-bar flipper guy again!I i've have desgined the design the idea of our robot bot there's two problems we faced:
The size,we're making a "Vald The Impaler" with six wheels and a wedge,but if the size would be too big and over weight.
The Battlebots rules: Does Battlebots allow 'expensive' materials (like diamond axe on Mortis or Root Canal(Middle weight) 's diamond tipped blade?)
Thanks [TeamCombatRoboticsMalaysia, Selangor]
Anyway here's our new motto : "No luck,pure skill"
Great ,eh?
A: Mark J. Glad to hear that your design is progressing.
I'm not sure how I might help with your overweight problem. It's usually possible to find and add up the component weights to estimate the mass of the completed robot, but your suppliers may not have that info available.
You can download the 2016 BattleBots rules and read the prohibited materials for yourself. There are no restrictions on expense, but you really shouldn't believe everything you hear from the robot descriptions on 'Robot Wars'. They described our robot 'Run Away' as being armored with 'diamond plated aluminum' which was nonsense.
If either of those robots actually had 'diamond tips' they were most certainly industrial grade stones which may be purchased quite inexpensively. You can buy an handful for a few dollars, but they aren't very useful: hard does not equal strong.
About that motto: sometimes it's better to be lucky than good. If you claim 'pure skill' it's gonna look bad when you screw something up -- and you will. Everybody does.
Q: Hi,Mark its me again,i've been thinking about a weapon that nobody have thought before: a diamond tipped wedge,the more sharper your tip of the wedge is the more chances of getting under the other bot right?(or no)
Soo it it possible to make a diamond tipped wedge?
i already threw away our idea of our motto,been thinking a new one.
A: As I mentioned in the last answer, hard does not equal strong. Glass is harder than some steel alloys but you don't see robot builders using glass for wedges. Diamond is much harder than glass but it is also brittle; a blow from a carpentry hammer can shatter a diamond. A good wedge cannot be brittle, and a sharp diamond edge is very brittle.
Additionally, there are practical problems with a very low wedge. Low, sharp wedges get caught on any small surface irregularity. Robot combat arenas are never as smooth as glass, and a low, sharp wedge can be more of a problem than a benefit. I don't advise playing the 'lowest wedge' game -- and how do you plan on sharpening the edge of your diamond wedge?
Some of the most creative minds on the planet have been building combat robots for more than 20 years. You're going to have a hard time thinking up a practical robot weapon that has not been tried at this point. Paying close attention to the basics of construction and design is a much better plan than adding exotic new features.
Q: My idea for drive in a 30 pound robot has been to drive 6 wheels with timing belts from one gearbox. I've seen a couple times in the past you have suggested around 3/8" steel shafting for this weight class. My idea was to use vex 1/2" 7075 shafting, where it would go:
...with basically no space between the bearing, 1/4" shaft collar, and wheel.
I would file a small weak point just after the shaft collar, so that if struck by a weapon strong enough to break the axle it would tend to snap off after the shaft collar and not bind up the rest of the drive, the shaft collar would stop the shaft from working out of its bearing and falling into the robot.
Is this a terrible idea? I could put a cheap 5mm titanium rod or something through the hex to reinforce it. I just figured it would be best for the wheels to tear off and sacrifice themselves rather than take other things with them. [Dublin, Ohio]
A: Mark J. I understand how nice it is to build with VEX components. They all fit together and assemble without trouble, they all come from a single source, and they are reasonably priced -- but they really aren't designed to withstand full-on featherweight robot combat.
A hollow 1/2" hexagonal aluminum shaft is not equivalent to a solid 3/8" hardened steel shaft, but might work.
The aluminum shaft is more likely to bend than snap off; ditch the shaft collar and don't add a weak point.
If the wheels are exposed, 'squishy' tires help absorb weapon impacts; sacrifice wheels - not axles.
Q: where should i buy the materials for a combat robot [Helotes, Texas]
Q: Hi Mark,
I am wanting to mount a pulley to a 5mm motor shaft. After scouring the internet, there doesn't seem to be any pulleys of the size that I need (2" OD) with a 5mm bore. I saw a previous post about shimming the shaft and was hoping you could go a little more in depth on the best way to do that. Could I just take a piece of shaft that matches the inside diameter of the pulley and drill a 5mm hole through it? Then drill a hole through the side to secure the set screw from the pulley to the 5mm shaft? [Corvallis, Oregon]
A: Mark J. There are good reasons why you can't find so large a pulley for so small a shaft-- it's poor engineering practice. You haven't told me what you're building, but I can't think of an application where this would be a good idea. I'd feel much better about this if you'd share your design with me; I might be able to head off a problem.
If you'd rather learn for yourself why this is probably a bad idea, your solution is on the right track. Rather than starting with something the right outside diameter and trying to bore a precise concentric hole thru the center, it's much easier to start with a piece of thick-wall tubing with an inner diameter matching your 5mm shaft. You can turn down the outer diameter on a lathe if needed to match the inner diameter of the pulley. Drill a hole for the set screw to pass thru and you're set.
Q: Just a note on pulleys and small-diameter motor shafts, I have actually seen pulleys that large for even smaller shafts (in Tamiya kits) but they're made more like spoked wheels. I don't know if that changes anything about it, though. [Illinois]
A: Such pulleys are made for low-power low-speed applications -- certainly not to attach to the shaft of a high-speed motor in a combat robot. I don't know what the builder from Corvallis is trying to make, but I can't think of a combat application where a 2" pulley on a 5mm motor shaft is a good idea.
Q: Thanks a lot for the advice. Looks like I'll be making some changes. Your answers to my previous questions have been spot on, by the way. One more thing; where can I find smooth pulleys for a 5mm shaft? I've looked all over and can only find timing belt pulleys that are that small.
A: Go ahead and use the timing pulleys and belt. A couple of tricks to get the needed slippage:
Use the stock pulleys and turn the timing belt inside-out; or
File down the teeth on the larger pulley -- leave just a bit to retain some belt grip, and run the belt a little loose.
I've seen both of these cheats used with success.
Q: After running a recent competition with lexan and falling in love with it, I was thinking of making my beetleweight with a flexible lexan outer skirt (A bit like Team Robo Challenge did with Terrorhurtz and beta), and I was wondering, which is better: Several pieces of lexan chemically welded together, or one continuous piece of lexan bent/molded into shape? [Oregon]
A: Mark J.General Materials Rule: a solid piece is stronger than multiple pieces welded together. A correctly welded Lexan joint has about 80% the strength of the surrounding material. Not bad if you need a complex shape, but weaker than a single formed piece.
Have you tried UHMW Polyethylene? Builders have largely abandoned Lexan in favor of UHMW except for top armor. It isn't as 'pretty' as Lexan but it's easier to mount and more flexible. It doesn't chemically weld, but it makes a very good skirt.
Q: Hey Mark,
Are bearings absolutely necessary for a spinning disc/bar weapon? I was looking at Team Nightmare's build of Backlash (1st version) and nothing was mentioned about bearings. It's kinda hard to tell in the pics, but it appears that the disc is attached to the pulley and they both spin on a dead shaft. Are there some type of bearings in there that I'm not seeing or is it possible to spin a weapon on nothing but a greased up shaft? [A few miles south of here, Oregon]
A: Mark J. Take another look at the weapon pulley in the 'Backlash' build report -- that's a sealed bearing at the hub. The loading at the hub of a high-energy spinning weapon far exceeds the capacity of a 'greased up shaft'. On a good hit it would spall and seize. You can (and a fair number of builders do) use oilite bronze bushings in place of ball/roller bearings to support weapon shafts. They have a bit more friction but can survive enormous shock loadings. Keep them well oiled.
Q: So if I wanted to use something like a needle roller bearing, I would put it on the dead shaft and then attach the weapon/pulley to the outside of the bearing? If so, what is the best attachment method? I know set screws aren't great but could they work for a 12 pounder?
A: Not a great idea to apply significant point force (like a set screw) to the outside race of a bearing. A needle bearing would typically be installed in the weapon/pulley as an interference press-fit with thrust bearings and spacers taking up any lateral motion on the shaft.
Alternately, flanged ball bearings can be simply inserted into the sides of the weapon/pulley assembly to be held in place by the structure supporting the dead shaft. Washers or tubular spacers can take up any excess clearance.
Q: How can I install a pulley on a brushless outrunner motor? [Quebec, Canada]
A: Mark J. Well, you could do the obvious and slide a nice FingerTech pulley onto the output shaft of the outrunner and tighten down the Allen screw. That works. I'd file a flat spot on the shaft to give the Allen screw a better bite, and I'd put a drop of threadlocker on the screw to keep it from loosening.
Q: Do you know anyway to mount 3" colson wheels on a 4mm 'D' shaft. I know I could custom make a hub but I was trying to avoid that. Anything off the shelf or that can be put together easily? I'm thinking trying to make a mount like you would on a car but can't make the jump in my mind to a easily workable solution.
I'm thinking these [dead link removed] but am not certain if they are large enough to mount around the bearing and cant think of an easy way to utilize the bearing in the mounting design.
Or some generic Robot Marketplace hub, bastardized some how.
Or these, cut to get rid of excess length, and a new set screw hold tapped in compliance with these but then I would likely have to ask how to make the shaft longer on a gear motor or if there is a way to extent it unless you think the long hub would be stable despite not being mounted with only one set screw.
Sorry if the links are confusing... I saw a lot of possible options but none of them easy. I guess I'm looking for advice on which is the easiest and/or most secure of if this is even possible or if you know of some dark magic to make them stick. Thanks.[Connecticut]
A: Mark J. Advice:
DO NOT BODGE, BASTARDIZE, OR PATCH TOGETHER A SOLUTION FOR HUBS!!!
Hubs take a lot of loading in a combat robot, and it's really embarrassing to have your drive wheels fall off. None of the options you've found are suitable for a combat robot. Get them right!
It would be a great help to have some details on your robot (weight, drive layout, motors used...) so that I might better judge how much loading the wheels and hubs are likely to face. I will say that it is uncommon to fit such relatively large and heavy wheels to a gearmotor with a relatively small 4mm shaft. Proper Colson hubs typically start at about 3/8" shaft size. Why are you determined to use Colson wheels?
Have you considered the BaneBots T40 wheels and their ready-to-mount BaneBots T40 4mm hubs? Without details on your robot design I can't offer more guidance, but please don't rely on 'black magic'.
Q: Hi Aaron:
I build a flipper combot (220lb) , now i got a problem. The material of flipper weapon ,As we know the titanium is widly use in flipper weapon, but it`s so exp , I want use the thick aluminium alloy Instead of titanium , give me some advice plz :) [Yunnan, China]
A: Mark J. You don't build a robot out of a single material. Each component should be evaluated for the stresses placed upon it, the constraints of weight, and the processes needed in manufacturing. The goal is to build the lightest possible part that will withstand the expected forces by considering the need for surface hardness, toughness, and strength.
Each part is made from the lightest material with properties suited to withstand the specific forces to be placed upon it.
As it says in Frequently Asked Questions #17, Ask Aaron is not a free engineering service. I'm not able to provide a stress analysis of your chassis design and recommend a specific material and thickness for every part. In general, a change from titanium to aluminum alloy for a specific component will require that the new component be heavier and bulkier, and its ability to absorb shock loading and resist surface deformation may be decreased.
My advice: look to see what other builders with similar designs are using and learn from their experience. If it breaks, make it stronger.
Q: I've been to combot events and seen this sort of latex like coating people put of the foam tires, any chance you know what this is? See the photo at right. [direct email]
A: Mark J. The coating on the tires is RTV Silicone Sealant. You can buy a tube of the uncured gooey sealant in any hardware or auto parts store. It's available from several manufacturers and it commonly comes in clear, white, and black. When cured, the silicone 'rubber' is soft, flexible, and very grippy.
The pictured robot has a thick coating of silicone on the tire tread, but a thin coating is effective and easier to apply evenly. Clean the foam tires well with alcohol or lighter fluid and allow to dry. Spread a thin coating of the silicone sealant onto the tire surface with your finger, pressing it firmly into the foam tire surface. Allow the silicone to cure at room temperature for at least 24 hours before use.
Q: Hello sir i am concentrating on autonomous sumo which involves no weapon i really need your guidance. What is the track belts that is used in singapore games and where can i buy them.If you have any suggestions on motors and parts please tell. Do you know any online shops where i can get track belts which would solve my purpose [Tamil Nadu, India]
A: Mark J. Team Run Amok does not compete in sumo, autonomous or otherwise. I don't know what rules you're competing under or what weight class you're building, and even if I did I couldn't provide any detailed advice.
There is a lot of variation in the treads I've seen used in the Singapore events -- I suspect they're custom made by the builders from silicone rubber or polyurethane resin over a cloth base. I think you'll be better off with a more conventional sumo tire for your first autonomous sumo robot.
Q: What is the best substance to clean your tires with? Riobots suggests WD-40 because it leaves a sticky residue but you suggest lighter fluid for the opposite reason. Is there an even better product like Windex or something? [Pennsylvania]
A: Mark J. Save your Windex for cleaning the arena Lexan. Both WD-40 and lighter fluid are solvents that are effective in dissolving and removing oily deposits from tires. Lighter fluid evaporates and leaves only clean rubber behind -- it is my preferred cleaner for solid tires. I've never been able to find anything 'sticky' about the residue RioBots claims to have discovered from cleaning tires with WD-40, but feel free to experiment.
For foam rubber tires like 'Lite Flites' it's possible to gain a bit of traction by using fluids that chemically decompose the rubber a bit and leave it a little sticky. You can do this with expensive traction compounds available thru R/C racing sources, or you can visit your local pharmacy and purchase a small bottle of 'oil of wintergreen' (methyl salicylate) that works quite well. Wipe it on, let it set for a couple minutes, then wipe off any excess.
Note that a 'sticky' tire surface will very quickly pick up dirt and crud from the arena surface and loose it's traction much more quickly than a simple clean tire. Plan accordingly.
Q: will ar400 plate acts a barrier for an s7 tool steel single teethed drum bot [Tamil Nadu, India]
A: Mark J. AR400 steel is a fine armor material generally suitable for defense against spinning weapons, but effective armor depends on more than the material from which it is made. The ability of any armor to withstand a specific attack depends on thickness, temper, design, and mounting -- as well as the material.
Likewise, the effectiveness of a weapon depends on more than the material from which it's impactor is made. You're asking the wrong questions.
1. Can you put a 'D' shaft in a linear or ball bearing?
A: Mark J. Ball bearing - generally yes, but the manufacturer may recommend a specific shaft diameter tolerance.
Linear bearing - depends on specific bearing design. Consult the bearing manufacturer.
2. What is the purpose of shaft collars?
A: A shaft collar locks onto the shaft to prevent it from sliding thru a bearing/bushing. Set-screw collars suck -- use a clamping collar if available.
3. How do you connect a servo to the sheet metal you want to lift? Thank you. [Seattle, Washington]
A: Servos come with one or more 'servo horns' that mate to the splines on the servo output shaft. Select a suitable horn and run sheet metal screws thru the metal and into a few horn holes. Yes, I said horn holes -- you're welcome.
Q: Bite Force shows advantages of treads, but treads are not popular in combat robot, so what is treads' disadvantages? [Guangdong, China]
A: Mark J. What tread advantages do you believe 'Biteforce' is showing? It is getting fair traction on the arena's steel surface, but I think we can attribute that to the embedded magnets in the treads rather than the treads themselves. Treads are great for soft, uneven terrain, but really have no specific advantages on a flat, slick surface.
Disadvantages:
Efficiency -- greater frictional losses than simple wheels.
Exposure -- the entire length of the tread is a prime target
Expense -- treads aren't cheap, and the drive spindles are custom items.
Availability -- have you tried to find a tread suitable for robot combat?
Vulnerability -- if you lose the tread you have zero propulsion on that side.
Weight -- the tread needs to be supported at multiple points along its length.
Overall, I cannot recommend use of treads in a typical robot combat arena.
Date marker: August 2015
Q: What qualities do you look for in metals/plastics when deciding if they would be good for combat robotics? Is it possible to calculate the optimum thickness? Thanks [Pittsburgh, Pennsylvania]
A: Mark J. Different components of a combat robot require different material properties. A material suitable for a motor mount might not be at all suitable for a weapon impactor.
Our armor guide in this archive provides a brief overview of commonly available materials and their applications, as well as general guidance on thickness.
While you're here, this archive has hundreds of specific Q&A about materials and applications.
Chapter 3 of the Riobotz Combat Tutorial offers more detailed information on desirable material properties. You'll probably want to read the whole tutorial while you have it open.
As mentioned in the armor guide, although it is theoretically possible to calculate the required thickness of a specific component those calculations require very specific information on the force vectors applied to that component. It's impractical to evaluate those vectors for a machine that may be struck with great force from any angle. Look at materials and thicknesses used in successful robots of similar design for guidance. Make it strong -- if it breaks, make it stronger.
Q: hi mark ... will 3mm thick ar400 plate be good for a 60kg bot armour? ... it will be welded on the frame of the robot made of mild steel ...
Also ... can you suggest some good lithium polymer battery brands .. suitable for combat ... thanks [Delhi, India]
A: Mark J. As prominently mentioned in the FAQ and our Armor Guide:
Effective armor is a combination of material and design. I cannot comment on a specific material thickness without knowing the full armor design: dimensions, support structure, angle aspect, exposure to weaponry...
I'm not running a free engineering service, so don't bother to send me the armor details.
I will say that 3mm seems quite thin for some parts of a conventional armor, and amply thick for others. Not all parts of your armor will take the same abuse, so why use the same thickness everywhere?
You will need to use caution in welding AR 400 to mild steel. The heat affected zone around the weld will modify the temper of the AR 400 and make it very brittle. My welding guru tells me that it's best to use a 7018 rod with pre and post heating of the area around the weld.
I don't know what brands of LiPoly are available to Indian builders, and I'm unwilling to rank a whole bunch of brands to let you sort thru. My general advice is to give yourself a good margin on both the capacity and 'C' rating of the battery compared to your expected needs -- even a mediocre battery will do fine if you don't overstress it.
Q: hi there, my apologies for bugging you, but is this Mini Metal Milling Machine (link removed) reliable and trustworthy enough to be worth buying? I need a small milling machine/lathe to work on my sumo robot project and have serious doubts concerning this machine. Thanks [Singapore]
A: Mark J. I have no experience with that particular machine -- I can't make a recommendation. I can say that in general a sub-$200 mill that runs on 12 volts is more a toy than a useable tool.
Q: When did UHMW start to become common in combat robots? [Havertown, Pennsylvania]
A: Mark J. I recall Ultra High Molecular Weight (UHMW) Polyethylene first appearing in machined motor mounts around 2001 and quickly finding acceptance in sub-light robots as structural and armor pieces. By the time Team Run Amok's beetleweight 'Zpatula' used UHMW sheet for drop skirts at the 2004 RFL Nationals, the material was common enough that it did not garner any particular attention.
Q: hi i am making a bot of 10 kg of drum type which type of tyre should i use [Pune, Maharashtra, India]
A: Mark J. Soft rubber, not pneumatic. Durable wheel. I recommend the round ones. Something like these.
Q: hello aaron can i use 304 [stainless steel] as drum tooth???? if yes then it should be hardened or not because i heard that [stainless steels] are not hardened.... [India]
A: Mark J. The 300 series stainless steels are Austenitic alloys that CAN NOT be hardened by heat treatment. They are soft and ductile: not what you want in an impactor for your drum weapon.
Impact tooth material has been discussed many times here at Ask Aaron. There is general advice on impactor material selection in the Spinner Weapon FAQ and there are several discussions of specific materials in this archive.
Q: what is "Demonic Teeth" in india most the bot uses it for drum tooth. [India]
A: Mark J. Unknown. Ask an Indian robot builder, and then scold them for making up 'cute' names for materials.
Q: how can a material be hardened like tool steel A-9 like hrc 50 because in india most the people don't know about hardening process [India]
A: Mark J. Heat treatment of metals is a highly specialized process best left to commercial facilities. The details of the process vary from alloy to alloy and often involve very high temperatures, controlled atmospheres, and carefully monitored heating and cooling rates. Attempting to do your own 'back yard' heat treatment will very likely yield warped/distorted parts with unknown properties. I HIGHLY recommend that you find a commercial heat treating facility to do your hardening.
Q: Dear Mark,How to attach two pieces of PC(Polycarbonate) sheet in T shape(one piece's side attach to another's face)?I tried self tapping screw but it is difficult to tight and damage the sheet.Should I try ordinary screw?(I think team Hurtz did so) Another question, can I disassemble the attached PC and attach them with no damage? [China]
A: Mark J. Team Hurtz's preferred method of joining polycarbonate was to chemically weld the parts together with a methylene chloride solvent, although other specialized adhesives are available. This spreads the load evenly over the entire area of the joint and minimizes local stress -- a key in joining polycarbonate.
If you require a joint that can be disassembled, you should use course-thread machine screws. The fastening holes should be pre-drilled and the piece to be joined should be tapped with a proper thread cutting tool. You didn't mention the plastic thickness, but in general the screw diameter should be no greater than half the thickness of the plastic. Use plenty of screws.
Do not over tighten the screws! Tighten only enough to pull the pieces together. Polycarbonate absorbs impact forces by flexing, and areas of high local stress will develop around the fasteners. If the screws are already creating strain by being over tightened, the risk of fracture failure at those points is increased. A large thin washer under each screw head is a good idea to help spread the fastener loading.
Q: i was looking for alloy steels and which one will be good for drum teeth
en 18 ,en24 vs h12 ,h13(hot worked tool steel) [India]
A: Mark J. The topic of steel for impact teeth has been discussed MANY times previously in this archive.
'Ask Aaron' is not a free engineering service. I'm not willing to compare every possible subset of materials on a 'which of these is best' basis. Here are guidelines for impactor material selection:
Desirable properties for impactor teeth are hardness and impact resistance. Both are required.
These properties vary with the heat treatment (hardening, tempering) applied to the material.
Heat treating is mandatory, but do not sacrifice impact resistance for great hardness.
Look up and compare the properties (Rockwell hardness, Charpy impact score) of the materials available to you.
Equally important to material selection is the design of the impactors. The teeth must be attached to the drum in a way that minimizes localized stress on the impactor or they will fail. I'd much rather have a well designed impactor made of mild steel than a poorly designed impactor made of the finest tool steel.
Q: hi sir (india)
s7 tool steel is mostly manufactured in rolled bar forms how it can be converted into plates for my drum teeth
A: Mark J. S7 tool steel is generally shipped in an annealed (soft) condition. In this form it can be machined with conventional tools and processes. Before use the steel must be hardened and tempered to achieve its desirable properties.
Although S7 steel is a very fine impact tooth material, other locally available steel alloys that come in plate form may be good substitutes. The attributes required of impact teeth are a combination of hardness and impact resistance. There are many posts discussing the merits of different steel alloys for weapon teeth in this archive -- I suggest that you read them.
Q: Hey Mark, just a silly thing, do stickers get caught on spinners? My wedge has a Fingertech sticker on the front (a big one), and I'm slightly worried that a drum might catch on to it and launch me. [Pacific Northwest]
A: Mark J. Maybe not so silly. An anti-spinner wedge should be smooth, hard, and stiff. A proper spinner can and will dig into anything soft and get at least a little purchase. I can't say that the amount of drag will be enough to launch your 'bot, but I wouldn't take that chance with an insect class robot. I don't like to even paint a wedge! If nothing else, a torn up sticker might influence a judge into thinking that a spinner did at least some damage to your 'bot.
Q: Is Stainless Steel 304 a good armor for middleweight 60kg category against spinning drums? If not which are other materials which are better? [India]
A: Mark J. Right next to the blue button you pressed to ask your question it says:
We welcome combat robot questions. Check the Ask Aaron Archives first to see if your question has already been answered, then click the blue button.
Then, right below the question box is a super-easy method you can use to search the archives and recent questions:
Thousands more robot combat questions and answers in the searchable Ask Aaron archives.
I don't think that's too much to ask.
A pair of questions remarkably similar to yours are answered in a single post just a few days ago -- scroll down two posts. Entering '304' in the search box would have found that post and another '304' question in the archives. Next time do that first and you won't have to wait a day for an answer that was already here.
Q: i got a helical gear of 11.5 cm outer diameter with face width of 2.1 cm , internal diameter of 10 cm,number of teeth as 22. in which automobile it is used, how much load can it transmit,its speed in rpm . [India]
A: Mark J. So, you pulled a random transmission gear out of a wrecking yard and based on a general description of dimensions and tooth count you'd like me to track it back to the vehicle it came from and produce unpublished performance specifications?
I don't know whether to laugh or cry.
#facepalm
Q: What would be better as armor in 30 kg and 60 kg category: 202 stainless steel or 304 stainless steel? Any other suggestions? [India]
A: Mark J. Stainless steels are not commonly used for robot armor. Stainless alloys are formulated for corrosion resistance and high heat performance -- attributes not valued in robot armor. Both of your suggested alloys are relatively 'soft' and deform easily (low yield strength), and neither can be heat treated for improved hardness. Of the two alloys, 202 would be my choice for armor due to its slightly greater hardness and yield strength.
I don't know the full list of materials available to you, but other Indian builders are using EN24 'chromoly' steel. EN24 is much better suited to use as robot armor and should be considerably cheaper than the stainless alloys.
Q: hi .... I would like to add to the 202 armour question . can u plz suggest some good options for armour. So i can see if the material is available to me . I have used 202 and it worked good . Titanium is out of budget . any other Bite proof (lol) good material ? [India]
A: See FAQ #17. Although I'm pleased to comment on specific materials, I don't think it's reasonable to ask me to list and evaluate all possible metal alloys, polymers, and composites so that you can pick thru them. It's better if you do your own homework on this.
I suggest that you read Chapter 3 of the Riobotz Combat Tutorial for an extensive listing of robot structural materials and for guidance on evaluating the specific materials that are available to you. Read the rest of the tutorial while you're at it.
Tip: don't rely purely on the properties of the material. Great armor depends as much on design and mounting as it does on the material itself. I built two champion robots armored with wood.
Q: which bearing gives maximum efficiency? [India]
A: Mark J. Cost efficient? Wear efficient? Weight efficient? Energy efficient? Drag efficient? Some exotic bearings have effectively zero friction, but have requirements that severely limit their uses. Bearing choice depends on the details of your application. The hamburger is bad.
In a combat robot durability is a much greater concern than efficiency. A bearing that fails is useless, regardless of other favorable attributes.
Q: I've heard that you can anodize metal to change to change it into cool colors. How do I avoid making it weaker when I do so? [Massachusetts]
A: Mark J.Anodizing is a process that thickens the natural layer of oxidation on the surface of certain metals. The thickened layer of oxide can reduce surface wear and improve corrosion resistance, but it does not effect the physical properties of the metal beneath the surface. You don't weaken the material by anodizing it.
The effects of anodizing vary with the metal:
Anodizing titanium can produce color effects on the surface of the metal;
Anodizing aluminum does not directly produce 'cool colors', but the oxide layer can absorb dyes that create bright colors.
Ferrous metals (iron, steel...) cannot be effectively anodized because the iron oxides created do not have properties that improve surface wear resistance or corrosion protection.
Q: will aluminum pulleys work for transmitting power from motor to drum? i mean will the keyway expand wid the jerk created [Maharashtra, India]
A: Mark J.The hamburger is bad. There are various grades of aluminum, various designs for hubs, and assorted sizes of pulleys. A properly sized aluminum pulley with a well designed hub made from a good quality aluminum alloy should be fine.
Q: Hi, we are using a Hitec Giant Scale HS805-BB Servo motor in a mechanical engineering senior design project. We hoped to have a shaft coming directly out of the spline, but all the Servo Shaft Couplings I can find online are for a C1 size spline, and ours is D1. Do you know of any vendors with D1 size, or at least any vendors that might have a D1 to C1 adapter? Thank you! [New Jersey]
A: Mark J. You've just learned a valuable engineering lesson:
In any mechanical design project there is one vital part that should be available off-the-shelf but isn't.
Suggestion: tear apart an old servo and extract the final drive gear that has the C1 splined output shaft. If you don't have an old servo send me your address and I'll send you the output gear. Center the C1 output gear on the output horn of your Giant Scale servo and sink a couple screws thru the gear and into the horn. Presto, you've built your own adapter.
Q: I would appreciate that part! We are on a very limited budget, and do not have a servo to spare. Could you send the part to [address redacted]. Thank you!
A: I'll have it in the mail tomorrow. All my junk servos are Futaba, so if you order accessories make them for the 1/4" Futaba 3F Standard Spline (25 tooth).
Q: hi mark lucky here thanks for ur precious guidance in yr 2014 because of which my team won 3rd prize at ITT B robowars,
again I have one question that upto which hrc I should heat treat the EN24 material? [India]
A: Mark J. Glad to hear of your success at Robowars, Lucky.
Check this previous post that addresses hardening EN24 steel. The full answer on hardening depends on the use you will have for the material. If you plan to use it for a weapon impactor you should consider other options.
Q: Hi..mark..what is the range of hardening H13 and D2 material for tooth of drum.. [Pune, India]
A: Mark J. The next post down this page is a post from a couple days ago discussing D2, A2, and H13 tool steels. Read that.
General notes:
H13 is a 'hot working' steel designed to retain useable properties at VERY high temperatures -- not the conditions encountered in a drum impactor tooth. Room temperature hardness and toughness are poor. There are much better drum impactor materials.
D2 is a steel designed for high resistance to wear in prolonged use in dies and shearing blades -- not the primary property of interest for impact teeth. At HRC 60 hardness it has an acceptable blend of hardness and toughness. I would rate D2 steel as only a fair impactor material.
A2 is a general purpose tool steel. At HRC 60 hardness it has much greater toughness than D2. It makes a good impactor material.
The preferred impactor material is S7 shock-resistant tool steel, but I'm told that it is not available from Indian sources. Tempered to HRC values around HRC 58 it has several times the toughness of D2 or A2. It may be overkill, but if you have access to S7 you'll probably want to use it.
Q: i am using EN24 metal for my weapon teeth ,what is maximum hardness mark ? please tell in HRC . 50 hrc is good for great impact [Tamil Nadu, India]
A: Mark J. EN24 is the European designation for SAE 4340 chromoly steel. This alloy is a general purpose low alloy steel, but it is not commonly used for weapon impactors. Weapon teeth require a combination of hardness and impact resistance, but EN24 looses impact resistance rapidly with increasing hardness.
EN24 can be hardened to HRC50, but at that hardness it would be VERY brittle and have a very high risk of fracturing on high-energy impact. For comparison:
EN24 Steel at HRC 45 hardness has a Charpy impact score of 21 -- quite poor.
S7 Tool Steel at HRC 55-58 hardness has a Charpy impact score of 171 -- excellent.
That's why tool steels are the preferred impactor materials. If I had to use EN24 for impact teeth I wouldn't harden beyond HRC 40 (Charpy impact 45), and I'd make the teeth extra wide and deep.
Q: hello mark . can u suggest drum teeth metal for us . here s7 tool steel is not available and its imported price is high , can u suggest some other steel for drum teeth impact , if any other tool steel can replace s7 tool steel means please mention all listed the above with hrc rating ?
A: I'm not going to look up the properties for all the possible alloys since I don't know which are available in India. Commonly available impact-resistant tool steels include O1, A2, D2, S7 and W1. Find out what your suppliers offer and look up the properties for those steels. Don't assume that the greatest HRC is best -- you want an alloy that is both tough and hard.
Q: gud eve ,in India available H13 , A2, D2 tool steel alloy , from this three which is good impact for drum weapon ?
A: From my answer above -
"Find out what your suppliers offer..." - Well done.
"...and look up the properties for those steels." - FAIL.
Any of the three available alloys would be acceptable for impactor use. There are differences in expense, workability, ease of heat treating, and hardness/toughness blend. I know which I'd choose, but your priorities may be different. To make your choice I again suggest that you look up the material properties of the alloys.
Q: hello, please i need to know what kind of gearbox is necesary to transmit 75Nm of torque, and 500rpm, using two 11.1 V lipo batterys and this motors: Maxon RE series motors. [Ecuador]
A: Mark J. The link you provided takes me to a Maxon motor catalog with 131 pages of RE class motors -- I can't tell which motor you're asking about. If you could supply the specific Maxon part number I could offer some comment.
In general, Maxon 'coreless' motors capable of the output you're looking for are VERY expensive and have robot combat use only in high-end sumo robots. Maxon does make planetary gearboxes (also VERY expensive) capable of transmitting 75 Nm of torque, but the reduction ratios of those gearboxes cover a limited range and cannot provide the 500 RPM output you seek. The mounting face of the larger Maxon motors does not match the faces of any commonly used robot gearboxes I know, and commonly used robot gearboxes are rated for no more than 50 Nm of torque. You may be looking at a custom (EXPENSIVE) gearbox solution.
Q:something about tyres ...... they say friction does not actually depend upon surface area ... assuming that coefficient of friction remains same throughout the arena.... how would it actually make a difference using [wide] and [narrow] tyres . theoretically it should not ... but what happens in real? And how [wide a tire] should I use for my 4WD wedge bot ? one thing I noticed is that the skid drive is difficult in [wider] tyres [India]
A: You are correct. Wider tires - in theory - do not generate greater traction than narrow tires bearing the same load.
Race cars use wide tires to better control heat build-up under racing loads, not directly for increased traction. Race tires also get physically 'sticky' when hot and can generate coefficients of friction greater than 1.0 at the expense of greatly increased rolling resistance. Neither of these situations apply to combat robots. Some early combat robots used go-cart race tires with very poor results because the robots just don't generate the high-energy loads needed to bring the race rubber 'up to temperature'.
So, why do some robots have wide tires? There is that little caveat you mentioned in your question, "...assuming the coefficient of friction remains the same throughout the arena". Combat arenas are dirty, dusty, oily, greasy, messy places. A wider tire covers a larger 'contact patch' and will be less effected by small slick spots.
I can't supply you with a formula to calculate the optimum width for your tires. It would depend on robot weight, power, rubber compound, and arena conditions that you really aren't going to know in advance. Your observation that wider tires do make skid-steer robots less maneuverable is a good one. It would be nice to be able to arrive at the arena with an assortment of tire widths and compounds to try before the event, but that isn't terribly practical.
My advice is to stick to moderate tire widths and to clean them with a solvent before each match. I use 'lighter fluid' (caution: flammable), but alcohol (caution: flammable) works well too.
Q: what is wheel traction compound exactly ... I read about it online , how does it work ? does it remove a small layer of rubber or just cleans it ? is it suitable for all kinds of rubbers? I have used cricket bat grip wrapped around tyres for grip ... can we do anything more to increase traction ? [India]
A: Mark J. Many different products are sold as 'traction compounds':
Some are chemicals that break down rubber molecules into shorter lengths, softening the rubber surface and making it more 'grippy';
Some are resins that bond to the rubber and provide a thin high-traction layer;
Some are just sticky goo that forms a weak adhesive bond between tire and surface.
Different types of traction compound are applicable to different types of rubber and to differing conditions. First, check your event rules about tires and traction compounds. Many events forbid applying anything 'sticky' to the tire, and most would not be pleased to have you use a compound that leaves a residue on the arena surface.
Serious sumo tires made from soft polyurethane resin or silicone rubber do not require chemical help to deliver optimum grip on smooth, clean surfaces.
The Ask Aaron archives have many posts on traction tricks, the best 'rubber' for sumo tires, and links to instructions on how to mold your own super-sticky urethane treads. Search the and this current archive for 'sumo'. You'll also find reference to some more exotic methods of improving traction, including magnetic and vacuum downforce. Again, check your event rules carefully.
General tip: wipe your tires clean with a solvent before each match to remove any oily residue and dirt -- a tire covered with dust is not a grippy tire.
Q: Hi Mark. Hope you are well.
I found a local material place that stocks decent aluminum for robot purposes, mainly stuff like 6061. I noticed they also offer 2011 grade for the round bar. Price is very good, about the same/slightly cheaper
than 6061.
Do you know if it is any good for robot uses? I would be using it to make gearbox housings, motor mounts and mounting standoffs in a 30lb full combat machine.
Thank you for your time and continuing the website. [Surrey, England]
A: Mark J. You're very welcome, and thank you for your kind wishes.
A source of 2011 grade aluminum at a price similar to 6061 alloy is a good find. 2011 aluminum typically runs about twice the price of 6061.
Known for its excellent machineability and bright finish, 2011 aluminum also has a bit better strength and hardness than 6061. It is well suited to your intended uses.
Note that 2011 aluminum has poor welding characteristics. For welded structures I would switch to the 6061 alloy.
Q: As a newbie I have been trying desperately to find a template list of basic components for a hobbyweight robot but so far nothing. Its not that I am lazy or want a short-cut and in fact I have already read loads of articles on robot building and have browsed endless parts catalogues.
What I am after is a set of basic components (motor/hub/wheel/controller/battery) to use as a base reference (a sort of "minimum specs" with which the robot would at least function).
The thing is some of these motors are really expensive! I certainly don't want to buy a motor that is overkill but neither do I want my robot to fall apart due to plastic gears or weak shafts or some silly thing like that! So its not just a trivial decision. [Tarxien, Malta]
A: Mark J. I can certainly understand your desire for guidance on components, but combat robotics really isn't a 'template' type of endeavor. A fighting robot is often greater than the sum of its parts, and a good portion of the challenge is to create a design that compliments the strengths and minimizes the weaknesses of available components.
All the components of a 'bot must function well together, so choice of 'motor/hub/wheel/controller/battery' will vary with the design you have in mind for the rest of the robot. For example, a wedge or rambot will call for more speed and power from the drivetrain than would be appropriate or needed for a drivetrain that will push around a big spinner weapon.
The hobbyweight class is currently lacking in off-the-shelf components that are well suited to the purpose. In particular, robust gearmotors with reasonable output and simple mounting options are just not available. The traditional source of hobbyweight motors has been hacked cordless drills, but they require some work to adapt to the purpose and are awkward to mount.
If you ask a dozen different sources for recommendations on hobbyweight 'motor/hub/wheel/controller/battery' you'll get no consensus on components. Everyone has had a good or bad experience with specific items.
Bottom line: the hobbyweight class is currently a poor entry point for new builders. If you have the option to build for a different weight class I'd recommend you give that some consideration.
Date marker: October 2014
Q: A few months back I designed a beetle weight wedge with a polycarbonate shell over a 3D printed skeleton. The skeleton had nuts hot glued on the inside which the polycarb bolted to. The printer I had access to could print either ABS or PLA; I chose PLA because it prints better in that printer. By the end of the first event that I took it to, the printed substructure had broken in several places. Many of the fractures occurred at places that obviously should have been thicker and I also plan on reprinting with a higher fill percent.
Do you think the substructure would be more resilient if I printed with ABS instead of PLA? [New York]
A: Mark J. It's a little complicated. ABS is an overall stronger plastic than is PLA, so if you carved a chassis from a solid block of each material the ABS chassis would be considerably stronger.
Complication: PLA bonds to itself much better than ABS does when you're layering it up with a 3D printer, which means the ABS has a tendency to delaminate. This makes a structure subject to loading from all angles (like a combat robot chassis) much weaker.
The final verdict would depend on the intricacies of your chassis design, but in general PLA makes a stronger and more resilient 3D printed structure than does ABS.
Comment: Thank you! I hadn't thought about delamination. I think I'll stick with PLA and thicken the weak areas and print with a higher fill.
Q: should i buy colson wheels and live hub or directly ampflow wheels? m using local gearbox for ampflow motors [Maharashtra, India]
A: Mark J. The 4" thru 10" AmpFlow wheels are Colson wheels with a hub that mates with the AmpFlow gearboxes. If your 'local' gearboxes have output shafts identical to the AmpFlow gearboxes the AmpFlow wheel/hub combos will work very well for you. If your gearboxes have a different output shaft you'll need different hubs for Colson wheels.
Q: VestedMadScientist here. What do you think about a double-layer of 1/8" lexan (totaling 1/4") as armor for my lightweight BattleKit? Should I try it or should I just use a single 1/4" thick sheet?
A: I use 1/8" Lexan on my antweights -- I think you're gonna need more than 1/4" for a 'bot 60 times that heavy. Just how much top armor you need is debatable because few competitors build overhead hammer/spike/saw weapons to attack from above. However, they are out there and if you run into one with poor top armor you can find yourself in serious trouble -- video.
Lexan is able to survive large impact because it deforms to absorb the energy. You need to leave considerable room for this deformation between the armor and what you're trying to protect. For your application I think I'd recommend something a little stiffer -- consider garolite. There are several posts about garolite in this archive. And yes, garolite is radio transparent.
Q: Hi aaron my bot is a full body spinner weighs 30 kgs .im using 2, 18v bosch cordless drill motors for drive. The wheel diameter is 10cm and thickness is 3 cm it is a cast iron wheel. I dont know how to choose tyres. for good traction what tyres i need to use?
And one more doubt my drive motor comes along with the [two-speed gearbox] - for good performance i need to stick with low speed or high speed??? [Tamil Nadu, India]
A: Mark J. There are many different versions of Bosch 18 volt cordless drills. I don't know which you have, so I'll have to guess at the output speed and torque.
If the Bosch advertised performance figures are correct you'll want to lock the gearbox in the 'low speed' range (about 500 RPM output). With 10 centimeter wheels you'll have a top speed near 6 MPH with good acceleration and pushing torque - perfect for a full-body spinner in a small arena.
Tire selection depends on arena conditions: surface material, evenness, and cleanliness. Some soft and 'sticky' tire compounds that work well in a very clean and smooth arena will pick up dust and oil very quickly and become almost useless in a dirty arena. My best advice is to find out what successful competitors are using in the specific arena and pick something similar. Traction isn't usually a big issue for a full-body spinner, so any medium-soft solid rubber tire will probably be fine. Pneumatic tires are just one more thing to maintain that can go wrong -- go with solid rubber
Q: hi mark i m trying to make 'braker box' type robot. i dont wana use titanium for front weapon. can you please suggest be any other best option instead of titanium [Jalgaon, Maharashtra, India]
A: Mark J. Previously discussed. Search the archive for "spinner killer scoop" to find a couple of posts.
Make the scoop thick and make the supports strong. 'Breaker Box' uses 3/8" thick tempered titanium for the scoop and 1" thick titanium for the support arms. The scoop is nearly half the total weight of the robot. No point in building a scoop if it gets torn away by the first hit it takes.
Q: for braker box type robot which grade of titanium is best. can i use titanium grade 2 material. or suggest any other material insted of titanium?
A: In the upper part of this post thread I provided a pointer to a post in the archives that discusses an alternate material choice for scoops. Is it too much trouble for you to do the search and read the post?
Here's a quick summary of what you would have discovered if you had bothered to read the upper post, run down the search, and poked around a bit in the archives:
Grade 2 unalloyed titanium has a yield strength less than 1/3 that of the 6AL-4V alloy -- it is far inferior for armor or scoops.
Tempered 6AL-4V titanium is strong, resilient, and has good surface hardness for it's weight.
Aluminum (even aircraft grade) has too soft a surface for a scoop -- a spinner weapon can dig in and get grip.
Low carbon steel alloys are hard and strong, but heavy. The titanium scoop on 'Breaker Box' makes up nearly half the total weight of the 'bot. To get the same strength in steel would add even more to the scoop weight -- probably impractical.
If you do need to use steel, try that search I suggested above to find a specific steel alloy recommendation. DO NOT come back and ask this question again!
Q: to add something that isn't in your archives to the scoop question.
Abrasion Resistant steel, the stuff that excavator buckets and shooting range targets are made out of would be another viable scoop option. AR400, AR500 or Hardox 450 would probably be worth looking into. It is also worth noting that AR steels do not machine well and plasma or water jet cutting are the best options for working with it. [Alex, Team Cooking With Gas]
A: Hardox and other abrasion resistant steels are popular armor materials in the United Kingdom but - as you point out - it is really difficult to machine and weld. Availability of the material (as well as specialized cutting techniques) in India is questionable. AR steels are very tough and worth considering if your material fabrication skills are up to it, but I can't recommend it to an inexperienced builder.
Q: hi aaron which material is best for front schoob. [Aurangabad, Maharashtra, India]
A: Mark J. See my answer to the question immediately below. Your 'scoop' question has been answered both recently and repeatedly here at 'Ask Aaron'. Spend three minutes of your time to look up the answer. Hint: some alloys of atomic number 22 work very well.
Q: Hello Mark, I want to use aluminium as base plate, top cover and armour/wall for my bot. Now there are many grades of aluminium available in the market, which varies considerably in strength but their Young's modulus are almost constant (69 GPa). The design for the base plate, top cover and walls shall be governed by the Young's modulus as they experience only "shear forces" (for resisting bending and flexure) not tensile forces, right? So why should I opt for the expensive 7075 or the medium priced 6061 when I can get much cheaper aluminium?? [Las Vegas, Nevada]
A: Mark J.Young's modulus (AKA elastic modulus) is not a measure of strength -- it is a measure of how much the material deforms to a given stress over the range of deformation from which it can still 'snap back' to its original shape (stiffness). It does NOT define the point beyond which the deformation becomes permanent (yield strength) and the material buckles (plastic deformation).
The cheap (1000) aluminum and the good stuff (7075) both elastically deform at about the same rate in response to pressure, but the 1000 gives up on elastic deformation and buckles (80 MPa) long before the 7075 does (503 MPa). The surface hardness of the aircraft grade alloys is also much greater, which keeps rotary weapons from 'digging in" and getting a spot to grab onto and throw your 'bot.
The more exotic alloys are well worth their extra cost for combat robotics. Grab a few samples and start pounding on them with a hammer. You'll quickly see the difference.
Aluminum Type
Yield Strength
Young's modulus
Hardness
1000
80
65
35
7075-T6
503
72
150
6061-T6
276
69
95
2024-T3
345
73
120
Q: I'm really from Mumbai, Maharashtra Mark. How do I convince you? There are no slot machines here, what you are hearing is the sound of metal being fabricated, forged and machined :P
A: Well, you are using google.co.in as your search agent on your Chrome 31.0 browser running on a WinXP computer at 1280x768 resolution. However, your IP address is registered at UnXis in Las Vegas, Nevada. Puzzling. I suppose I can take your word for being in Mumbai -- but I'm still gonna call you 'Las Vagas'.
Q: Hey there Mark, my deepest condolences for your loss.
I have a question about mounting tires... Many of the wheels I'm looking into using, such as Marathon, Carefree, etc, are pre-assembled with bearings built into them. Since I'm designing for a live shaft, this won't work. Can I push the bearings out and fit these for use with a key for a live shaft? Or is there some other way that this is normally done? Thanks! [Philadelphia, Pennsylvania]
A: Mark J. Finding the right wheels and tires can be a frustrating and difficult task. It is possible to press out the bearings and machine an insert to couple the wheel to your live shaft, but it can be a a challenge. With luck, you may be able to adapt an off the shelf hub to the wheels you choose. One of the reasons Colson wheels are so popular is the ease with which they can be machined to a variety of axle mounting situations.
Date marker: January 2014
It greatly saddens me to announce that my son, Aaron Joerger, died very suddenly on the afternoon of October 18th, 2013 of an apparent pulmonary embolism. He was 22 years old. Aaron's obituary.
The 'Ask Aaron' project was important to Aaron, and I have decided to continue the site in his memory. Thank you for the many kind messages of sympathy and support that have found their way to me.
- Mark Joerger, Team Run Amok
Q: Hi Aaron, there will be a combat robot tournament in my country next month. The battlefield measured 8m x 8m with a flooring made of aluminium checker plate. My 30kg bots use 4" colson tires and i only have a set of spare tires for this tournament, consist of a maximum 9 matches (3 minutes each) if i made it to the final. Have you ever fought on this type of flooring? How do you think the colson tires will perform on the checker plate surface? (I'm about to get few sheets of aluminium checker plate for the training session of my bot next week, but i cant help myself to ask for your view on this matter). I also did notice on the net, a robot that use the colson tires with some modification, cutting a thread pattern...perhaps to get more grips? Is this recommendable, maybe if the tires worn out and became slippery after few rounds? [Maylasia]
A: I've never encountered aluminum checker plate used as an arena floor. Flat steel plate is the common arena floor material -- cheaper and much more durable. Aluminum also forms an oxide layer that is both hard and slick. I don't think anyone is going to have very good traction out there. Clean your tires with a solvent soaked rag between every match.
I am concerned about the performance of the fairly hard Colson tire material on an uneven surface like checker plate. You may experience a fair amount of wheel bounce and 'chatter'. A softer foam or semi-pneumatic tire might be a better choice. Colson 4" wheels come in several widths: 0.875", 1.25", 1.5", and 2". This type of surface would favor the wider wheels to better bridge the raised pattern and skim across the texture rather than dropping down into it and bumping along.
If your testing shows unacceptable chatter across the checker plate, you may wish to experiment with cutting multiple annular grooves around the circumference of the tire -- not for added traction, but to soften the tire to better conform to the textured surface and transmit less 'bounce'.
I wouldn't worry about tire wear. Colson tire material is very durable, and I don't see a 30kg robot causing any significant wear on a set of 4" Colsons even in a 9 match tournament.
Q: if the the author of the aluminum diamond plate arena floor question is concerned about traction, he might want to look into a lower durometer wheel like mcmaster part #2243T22 or the orange banebots wheels [Parts Unknown]
A: The regular soft McMaster wheels are durometer 65, but the extra-soft McMaster 2243T22 1" by 4" wheels are durometer 40 and might be a good alternative to the Colson Performas. I don't have first-hand experience with the McMaster wheels, but they appear to be sturdy and have a load rating similar to the Colsons. I'd still favor a wider tire to span more of the raised floor texture in this specific case.
The narrow BaneBots wheels are available in soft durometer ratings (30, 40, and 50), but they are lighter and less durable than the Colsons. I could not recommend them for exposed service on a 30kg combat 'bot. Note that a softer durometer rating by itself does not guarantee improved traction on a slick surface.
Robot haiku:
Aluminum floor?
The oxide is slippery.
Should be fun to watch.
Q: Which tyre team plumbcrazy use in there bot Pipe wench & Devils plunger? &is colson is better than this tyre ? [India]
A: The solid foam tires are from Carefree Tires, buffed down to the foam core. Not sure what rims are used.
Which wheel/tire is better depends on the robot specs, the arena, the types of opponents you will face, and how you value traction versus survivability. Different tires will also give a different 'feel' to the handling of the robot -- you may develop a preference as a driver.
Q: Dear aaron
I feel pipe wench use 5inch dia tyre, I check website of carefree tyre but the min dia of tyre is 8 inch .can you pls give me any dealers name where I get 5 inch foam tyre? my robot is middleweight wedge I use 2 ampflow f30150 for drivig with gear reduction of 1:13 and 5 inch wheel I am confused between colson and foam tyre can you pls suggest me which is better for me. and is this true that foam tyre absorb the shock but have less traction rubber wheel like colson have high traction but low shock absorbing capacity on same arena.
A: As noted in my answer above, Carefree tires are solid foam and they can be buffed or cut down to a smaller size. That's how Team Plumb Crazy reduces the diameter for 'Pipe Wench'.
It's potentially misleading to make general statements comparing Colson and foam tires, but there are several differences:
On a flat, smooth, very clean arena surface: Colson tires provide better traction than foam tires. The catch is that very few arena surfaces are all that flat and all that clean. Colsons will pick up oil and dirt quickly in a typical arena, reducing their peak traction. In my experience, foam tires lose less grip when dirty than do Colsons.
Colson Performa tire material is fairly thin and hard (durometer 65). This provides very little cushioning when struck by a spinner weapon. The tire and wheel are very durable and can survive large impacts, but a large portion of the impact shock will be transmitted on to the driveshaft and gearbox.
Carefree style foam tires are much softer and can deform a great deal under impact. This greatly lessens the impact shock transmitted to the driveshaft. In exchange, chunks of the foam material itself may be ripped away -- glue the tires to the rims! If your wheels are protected by armor the impact issue is less important.
Foam tires have a smooth and predictable traction 'breakaway'. As they approach the limit of traction, they start to slip a little, then gradually slip more until they run completely out of traction. Colson wheels tend to grip well right up to their traction limit, then abruptly break free. Many drivers will prefer the gradual breakaway of the foam tires.
Each type of tire has strengths and weaknesses. Champion robots have used Carefree, Colson, pneumatic, and other designs. Consider how the tire style will compliment your robot design and choose accordingly.
Robot haiku:
Foam tires are tough.
They absorb direct impact.
Traction only fair.
Q: what does hhx mean on a synchronous belt mean [Florida]
A: I don't know of an 'HHX' desination for timing belts, but I do know about 'XXH'. There are six standard 'pitches' of synchronous timing belts for different levels of power transmission:
Match the pitch and width
Of belt to motor power
Or you'll watch it fail.
Q: Wt material should i use to make a flipper of 4 bar mechanism?? more specifically, which grade of aluminium?
A: See #17. Performance of a robot component depends on both the material and the design -- I can't recommend a specific material.
Mark J. here: Aaron is correct, but on a practical note your choice of aluminum may come down 6061 alloy is widely available in a variety of shapes and forms, while the stronger 'aircraft grade' 2024 and 7075 alloys are harder to find -- as well as being more difficult to work with. Don't design for material that isn't available.
Robot haiku:
Too little info.
Material and design
Must work together.
Q: what weapon can i use for diamond body robot? [Temerloh, Malaysia]
A: I assume this is a hypothetical question?
Diamond is the hardest natural material -- but don't confuse hardness with strength and toughness. Common window glass is harder than mild steel, but glass makes poor armor because it is so brittle. Like glass, diamond is somewhat brittle and can be shattered by a good blow. Hit it with a hammer! There are many better (and cheaper) armor materials.
Robot haiku:
Very hard, diamond.
But armor can't be brittle.
Armor must be tough!
Q: Hey Aaron, I'm thinking of building my motor mounts/bearing blocks out of polycarbonate to keep weight down. Almost all examples I've seen use aluminum for mounting motors and bearings. I guess my question is.. how sensitive is polycarbonate to heat distortion? Should I stick to using metal to mount my components and use the lexan somewhere less tolerance-critical, like the side/back plates of the frame? Thanks.
A: Polycarbonate has a nasty habit of cracking around points of localized stress -- like bolt holes. Heat won't be your problem, but polycarbonate's strength comes from its ability to flex, and restraining that flex with standard mountings (like tight bolts) is what causes trouble. I've seen it used for a small clamp-style motor mounts, but I don't recommend it for that purpose.
Consider UHMW polyethylene instead. It doesn't crack, it's very light, it's easy to machine, and it's commonly used for bearing blocks and mounts in small robots (see: Weta and these EV Warrior mounts). See the archive for many posts about using polycarbonate and UHMW.
Q: Dear Mark/Aaron I am using 4340 as tooth material for my drum bot. What should be the ideal hardness I should go for? It should be hard enough to resist any shearing at the same time not too brittle to prevent it from being cracked. Please help.
A: Mark J. here: an 'ideal' hardness would require an engineering analysis of the tooth design and the weapon energy. We are not an engineering service, but I can give you some guidance. Normalized 4340 steel has a Rockwell C hardness of 35 (Brinell 321). The 4340 alloy becomes brittle as you approach Rockwell C 60, so in general I'd aim for a low to mid 50's hardness. If you break a tooth in this hardness range your tooth design is at fault.
Q: Hey there! I'm looking for wheels for my 120 lb robot. I designed and built my gear train with a 3/4" output shaft size, and I am looking to fit it with 8" diameter tires. I had originally thought finding a hub to fit on my shaft would be easy, but I've been having bad luck. I can't seem to locate hubs or wheel assemblies in my bore size. In addition, almost all wheels I come across have bearings built into them for a fixed-axle system, so these won't do either. Do you have any resources to suggest? Is it common for builders to drill their own bolt holes into wheels and use custom hubs? Am I missing something glaringly obvious? Thanks for your help...
A: It is entirely common for robots to use custom hubs bolted to the wheels. Do not kludge or skimp on the hubs! I've seen countless robots fail in combat due to a poor hub solution. A cheap cast metal hub is not suitable.
Colson wheels come in 8" diameter, are reasonably priced, are tough and grippy, and have been used on a great many combat robots. An on-line machine shop such as Westar Bot Shop can make a set of hubs to your specifications.
Alternately, Team Delta can provide a Colson wheel with a broached hub of your diameter already attached to the wheel. I'm not entirely certain that Dan is still making these hub/wheel combos, but it would be worth making a call to him if you can use broached hubs.
Q: Dear Aaron/Mark please tell me a good substitute for S-7 tool steel. The S-7 was to be used as teeth in a drum of M.M.I=0.03176 kgm^2, but I can't find S-7 anywhere. According to the compositions 4340 is the closest thing to S-7 I have found. Can it be used as teeth if properly heat treated? If not then what other options I am left with?
A: Mark J. here: S-7 tool steel is the material of choice for impact tooth surfaces because of its superior combination of toughness, hardness, and availability. A-9 tool steel has similar physical properties but is not so widely available.
Although not so suitable as the high-impact tool steels, 4340 alloy steel is an entirely adequate impact tooth material. The chromium/nickel/molybdenum content in 4340 adds good hardenability while retaining impact toughness.
Ultimately, the effectiveness and durability of your weapon impact teeth will rely as much or more on the design and build quality as on the choice of material.
Q: Hi, I was wondering how 3al-2.5v stands up compared to 6-4 alloy? I was planning on making a spinner killer scoop out of titanium and was wondering if I should jest bend the 6-4 into shape or buy a small section of 3-2.5 to cut in half for it. thank you for your time.
A: Ti-6Al-4V is the preferred titanium alloy for your application. Ti-3Al-2.5V is less tough and resillient and was developed for applications where parts needed to be cold formed, such as tubing. The aluminum/vanadium alloys are both greatly superior to the unalloyed 'grade 2' titanium.
Q: Hi, I've seen a few posts about carbon fiber and armor where you recommend solid carbon fiber as a suitable armor. I'd recommend avoiding carbon fiber for armor as it impact resistance is rather poor. It has excellent stiffness, but Kevlar is much more suitable for armor as it has higher impact resistance. A suitable Kevlar panel made with a foam or balsa core would likely be much better as armor than a solid carbon panel as well as lighter, though harder to cut to size and more difficult to find prefabricated.
A: Mark J. here: take another look at those posts -- we don't recommend CF as armor. The question below, for example, did not ask if I thought CF was a good idea but only which type of CF would be the best to use for armor. Without knowing any more than I was told about the design of the robot involved I would not presume to recommend an alternate material.
I completely agree that there are almost always better choices for armor applications than CF -- it tends to shatter. If you want a fiber composite armor, garolite and kevlar are usually better choices due to their higher fracture toughness. However, I can't recommend a 'soft cored' material for armor. Cored material is stronger in resisting bending forces, but more subject to impact penetration. With current judging criteria you cannot afford an armor puncture.
Q: So, I've been looking through the archives for posts that refer to using carbon fiber armor in an antweight, but due to difficulties of searching the archive with an iPad, I've been unsuccessful. I plan on building a horizontal spinner and I'm trying to save as much weight as possible for the weapon.
I was wondering which carbon fiber composite is better for the weight, the foam core or the balsa core When I looked at the material properties PDFs it appeared that the balsa core had the better properties but when looking at there (very general) Material data sheet under The technical area, it seems that divinycell foam core is the "best". what do you recomended?
A: Mark J. here: cored CF is designed for structural elements that will undergo predictable loading in bending or torsion. Combat robot armor is subject to highly unpredictable loading that requires different attributes -- in particular 'impact resistance'.
For use as armor you'd want the uncored, solid CF. Don't pay for any fancy finishes -- their surface is fairly soft and will show damage.
Q: Hi, I'm currently designing a robot in the 120 lb weight class, and I have a question about multiple-layered armor:
My current design involves armoring the robot with 1" thick Lexan plates that have undergone a couple modifications. The first modification would be to (carefully) drill 1/4" diameter holes in a 1" spacing straight through the lateral sides of the Lexan plates. Inside these holes, W-1 tool steel rods (or some other type of metal rod) would be inserted. The last part of the design is to cover the entire outside of the Lexan plates with a liberal coating of truck bedliner (most likely Rhinoliner).
Can you see any fatal flaws in my design? Any feedback would be a big help and greatly appreciated, as I have almost no robot combat experience, and sometimes research alone doesn't cut it when it comes to this particular hobby.
A: Mark J. here: we've had a few previous questions about layered multi-component armor -- search this archive for 'composite armor'. It is tempting to think that bonding dissimilar materials together might make a composite that has the strengths of each of the materials. What you generally end up with instead is a composite that accentuates the weaknesses of each of the materials, particularly when the materials used do not share similar stiffness.
For your proposed example:
Lexan (polycarbonate) gains remarkable strength thru its ability to flex under severe loading. If constrained by inflexible mounting (or stiffening rods) the plastic will fracture around zones of greatest strain -- like the holes you want to drill for metal rods.
Tool steel has very high hardness and stiffness. As the Lexan absorbs load and attempts to flex, the great majority of the loading stress will be directly transferred to the inflexible thin steel rods, which will resist bending 'til they snap. When the rod breaks there will be a high localized stress imparted to the plastic, which will then fracture.
A layer of spray-on polyurethane mixed with rubber grles (bedliner) will protect the Lexan surface from abrasion, but will also offer a soft, roughened surface that will provide excellent 'bite' for spinner weapons to dig into and hurl your robot. The preferred armor surface is hard and smooth with few exposed edges.
I'd consider that combination of flaws to be 'fatal'. You'd be much better off using just the Lexan (or maybe better - UHMW Polyethylene) if properly mounted to avoid localized stress.
Very creative and experienced builders and designers have been constructing combat robots for the last couple of decades, and the current armor materials are in use for very good reasons. My advice is that you don't try to revolutionize material science until you have greater experience in combat robotics.
Q: What is the difference between a linear actuator and a linear servo? Are they two different ways of producing linear motion, or is one a component for the proportionate control of the other? If they are different, how do the compare?
A: Mark J. here: an electric linear actuator is simply an electric motor connected to some type of drivetrain that produces linear motion. Many types of drivetrains are possible: leadscrew, rack and pinion, ect. You turn the motor on and the actuator extends until you turn it off or it hits the limit of it's travel. Reverse the motor polarity and the actuator retracts. A linear actuator requires an R/C switching interface and there is no proportional control.
An electric linear servo is a linear actuator with added sensors and circuitry required to provide proportional control. Plug it into your receiver, move the appropriate stick a little, and the servo moves a little. Move the stick more and the servo moves more - just like the little rotary servos commonly used in R/C systems. The terminology has nothing to do with the type of drive that produces the motion.
Some sources incorrectly use these terms interchangeably, so check carefully that you're getting the type of device you want.
Q: Could I make a suitable chassis for a hobbywieght out of alluminum? I understand that your not an engineering service but I need to know if the idea is feasible.
A: A great many combat robots have been built around aluminum frames. Our own hobbyweight 'Nasty Glass of Water' was made entirely out of welded aluminum. Aluminum box frames are popular for combat robots, as are pan frames. Welded or bolted -- plates, extruded sections, or machined from a single slab -- there are many options. A simple chassis might use an aluminum baseplate with UHMW side panels and an aluminum or Lexan top plate.
Search this archive for "Can I use Aluminum for a bot frame?" for more info.
Q: Is steel any stronger than titanium? Or is just that titanium so light that makes it popular armor?
A: There are many ways to measure strength of materials and there are many types of steel and titanium alloy. Very generally I can say that for most applications titanium is pound-for-pound 'stronger' than steel and that it has greater toughness, which makes for good armor.
Q: Hi Aaron, i just got an E-mail from Robot Marketplace, and they said that they don't accept orders from my country. so, what should i do? should i order from another seller? by the way, here's all the stuff i ordered (but they canceled the order):
Spektrum DX5e 5-Channel 2.4Ghz Radio System Mode 1 + AR6255 DSM2 6-Channel Robot Receiver
Team Losi Intelligent LiPo Balance Charger(with Powerpole to Banana Plug Adapter)
5 Anderson Powerpoles
Should i find another vendor that does want to sell to my country? [Indonesia]
A: Many (most?) US retailers will not ship to Indonesia due to an enormous amount of fraud and identity theft originating from that country. The items on your wish list are all available from multiple sources, so you may be able to find someone who will ship to you. Alternately you may have to rely on local sources and build your robot based on what parts you can obtain. Best luck.
Q: You wrote,
"I have never found a Hobby King product that I would recommend for use on a combat robot. Their products are well known for their low cost, not for their quality."
How many hobby king products have you tried?
A: Mark J. here: we've been taking heat on the forums about Hobby King products. A few teams use their their batteries and receivers and say they're 'OK', but one of the most often repeated bits of advice on Ask Aaron is:
'Cheap' and 'Combat Robot' don't go together!
Suppose you spend $1000 and many hours of your time to build a small combat robot. You pack up that robot and drive/fly off to a competition hundreds of miles away, get a hotel room, pay your entry fee, and set up your pit space with your tools and spares. When building the robot you gave some thought to which receiver you should use:
a Spektrum receiver used by the great majority of competitors with a long history of performance; or
a $6 Hobby King receiver recommended by three or four teams.
If you went with the $6 receiver and it craps out and takes you out of the tournament, aren't you gonna feel like an idiot for having tried to save a few bucks? I wouldn't use the $6 receiver from Hobby King in a combat robot, I can't recommend it to our readers, and I feel the same way about their other 'bargain' products.
If you're building a little park flier airplane to pass some time on a warm weekend afternoon, you don't need the absolute best products because it isn't a disaster if something fails. If you're putting a lot of time, effort, money, and reputation into a project with which you will compete, you need the best components available.
I have read the reviews of Hobby King products and I have talked with people who have used them. The consensus is that they are far from being the best components available. A major problem appears to be quality control -- maybe you get a good one, maybe you don't. It's a crapshoot.
I have never used Hobby King products. I also never eat at roadside taco trucks parked in the bad side of town. I don't believe either is worth the risk. When I see Team Plumb Crazy eating from the Hobby King taco truck I may change my mind.
Q: Hi Aaron, i've just looked at BaneBots collections of wheels, but none would fit my needs(my robot is 5cm tall, and will place the weapon like Hazard, Moros, and Ruiner) what should i do? should i use scooter wheels?
A: Whatever wheels you use, you must SECURELY mount them to the gearbox shaft. Poor wheel mounting is likely the single most common failure point for inexperienced builders. Do not screw this up!
If the BaneBots 2 7/8" wheels are too large, the Colson 2" and 1 5/8" wheels both have a 1/2" bore that will slide onto a BaneBots P-60 output shaft -- but you'll need to broach a keyway into the wheel bore and use a machine key to lock the wheel against rotation. You must also find some method to prevent longitudinal migration of the wheel along the shaft: machined grooves in the shaft for snap rings would be preferred.
Q: Hi Aaron, i'm searching for pulleys right now at McMaster-Carr, and i'm asking, which one of the pulleys will fit snuggly(tightly;not loose) to the BaneBots RS-550s Shaft?(i'm going for 8:1)
A: It's unlikely that you're going to find a suitable off-the-shelf pulley that will fit a specific motor shaft since there are so many possible sizes. The RS-550 has a 3.2 mm shaft. You will most likely need to either drill out or shim a pulley to fit. Information on belt size requirements for specific speed and torque loading can be found at the RoyMech timing belt website, or search builder sites for similar weapons to see what has been used successfully.
Q: Hi Aaron, i just wan't to ask, will a P60 BaneBots gearbox's shaft fit to a Colson wheel? if it doesn't fit, then, what wheel will fit to the P60?
A: Colson wheels come in a variety of sizes and bores, but none will mount directly to the BaneBots P60 gearbox output shaft -- a custom hub or other machine work is required. BaneBots has a wide range of hubs and wheels that will mount directly to the P60 gearbox shaft for a simple solution.
Date marker: February 2012
Q: Hi Aaron, what's the usual shipping time of RobotMarketPlace.com for South East Asian regions?
Q: Hi Aaron, i've just read your dad's Armor Guide, and i saw no "iron" in that guide. Is iron a great material for a hobbyweight-esque(5 kg) combat robot armor? please tell me your reasons. [Jakarta]
A: Iron is not in our armor guide because it is NOT a great armor material! Compared to other available armor materials it is heavy, soft, and weak. An equal-weight panel of hardened alloy steel is four times as strong and four times harder than the best cold worked iron. Aluminum and titanium alloys can be even stronger, and the resilience and light weight of many plastics make them much better armor than iron. I'd rather use wood!
Q: what do you think of the Pololu 30T Track Set? Are they suitable for sumo robot?
Disclaimer: We don't do sumo, and I haven't had the Pololu tracks in my hands to examine.
A: The tracks are made from silicone, which should provide good traction on a sumo surface. The tracks are 'stretchy' which may allow them to 'roll off' the sprockets under heavy loading. I suggest using the included idler sprockets to support the center section of the track for additional roll-off resistance and traction. A length of unsupported track will not add to traction on a uniform surface.
Q: I'm driving a four-wheeled 'bot with two motors so I need 1:1 ratio timing pulleys on each axle. Is it better to use larger pulleys because they will transmit higher torque, or is it probably safe to use as small diameter pulleys as possible to save weight? Thanks!
A: Bigger pulleys will transmit more torque, put less stress on the belt, and provide a more reliable drive. The weight penalty is small -- use the larger pulleys.
Q: Hi Aaron. I am building a middleweight ramp-wedge bot. Can spring steel (5160 steel) or stainless steel be used as the armor material? I searched about spring steel I am thinking of using it as armor material. But is it better than Stainless steel or Titanium? Thanks
A: Why would builders pay very big bucks for titanium alloy if relatively cheap 'spring steel' was better? The most common advice we give is 'see what successful builders are doing'.
The terms 'spring steel' and 'stainless steel' refer to material properties rather than specific alloys:
Several alloys are commonly referred to as 'spring steel' based on their high yeild strength and resilience following specific tempering treatment. Spring tempered 5160 steel is a reasonable low-budget choice for robot armor, but it is considerably heavier than a titanium alloy panel of equal strength. 5160 steel is typically sold untempered to allow easy cutting, shaping, and drilling. You will need to have the armor heat tempered before use.
Dozens of alloys containing a good amount of chromium qualify as 'stainless steel'. These alloys are known for their corrosion resistance rather than their physical strength. Unless you're worried about your robot rusting, there are usually better armor choices.
Browse this archive for links about steel alloys.
Q: Aaron, I am near completion on my antweight, but I'm a bit cautious. I was hoping to have a 'ring' like that on Weta. I'm wondering what material to use. I already have some .05" aluminum 6061. Thanks, Maryland
A: Beetleweight "Weta - God of Ugly Things" has (like many similar designs) a wheelguard loop of Ultra High Molecular Weight (UHMW) Polyethylene. UHMW is an ideal material for this purpose - tough, light, flexible, resilient, cut resistant, and inexpensive.
Q: OK, what thickness would be ideal?
A: I don't have enough info on your design to tell you 'ideal' -- see #17. As a starting point I'd suggest .125". UHMW is about a third the density of aluminum, so you can afford to go thick.
Q: Also, by deduction, I"m guessing that the aluminum will be ineffective, why would that be?
A: Let's say 'less effective'. If you hit aluminum hard it bends or dents and stays deformed. If you hit UHMW hard it flexes, absorbs the energy, springs back, and shows no damage. We have some basic material property information in our armor guide.
Q: Hello, Can you please tell me the difference between the Military Specification Stainless Steel Flathead (10-32) Screws and the regular alloy steel flathead black oxide (10-32) variants? The Military spec one claims 80K PSI tensile strength, but cost much more. The Black oxide alloy steel ones claim 144K PSI, but cost much less! Which one is stronger? Does the military grade one simply cost more because it is very precise? thank you for your time.
A: Mark J. here: Mil-Spec does not necessarily mean stronger or more precise. In this case the specification calls for corrosion resistance, and the stainless steel required to meet that specification is more expensive and more difficult to machine.
The black oxide screws have a higher tensile strength. Ideally, a threaded fastener is only exposed to tensile loading, but questionable design sometimes places significant shear loading on them as well. A high tensile strength material may fail under shear loading that a lower tensile strength material could survive, so 'which is stronger' is a complex question that depends on usage. The black oxide screws are the better general purpose choice.
Q: Hello Aaron. Our high school robotics team needs to heat-treat a piece of Aermet 100 steel for our wedge. It is 1/8 inches thick. However, heat-treatment costs big bucks a 500 dollar oven fee added to a cost by the hour. We do not want to have to spend this much money on such a small piece of metal. But, our school has a pottery kiln. Would it be possible to heat-treat our steel with the kiln? We have a detailed process from the RioBotz tutorial on how to heat-treat that specific steel alloy.
Another question: there is a chilling process involved after a preliminary heat. How would we cool the metal down? And does the temperature of the kiln equate to the temperature of the metal?
A: Mark J. here: you have picked an exotic steel alloy that is both time consuming and difficult to properly heat treat. It must be solution treated, quenched, chilled, and aged. You might well consider switching materials - Aermet 100 is almost certainly overkill for a wedge.
If you want to stick with Aermet I'd suggest contacting some other heat treating suppliers. They may be able to slip your small job in with a larger batch for very little cost. Shop around a bit and explain that you are a school robotics team.
It is possible to do your own heat treatment with your kiln, but the results may not be satisfactory. It's easy to decarburize or warp a metal piece if you don't know what you're doing. Packing the piece well in dry ice should be adequate to cool it to -100 degrees farenheit for the chilling process. Clipping a thermocouple directly to the metal is the preferred method of tracking critical temperatures as heat can very from place to place in the kiln.
Q: Hi Aaron. Previously I've asked about wheel selection for my 30pounds battlebot and you've suggested using banebots wheel. How about the colson wheel? Is it good compared to the banebots?
A: The Colson wheels have been used on a great many combat robots in a wide range of weight classes. They are very strong and make a good choice for a robot with exposed wheels. The Colsons are heavier and made of a harder traction compound than comparable Banebots wheels. More importantly, there are no off-the-shelf hubs available for the Colson wheels -- you'll need a custom solution. Banebots sells hubs for their wheels that are suitable for many applications.
Q: Do you have any recommendations for high pressure (850psi) high flow solenoid valves that are cheaper than Burkett solenoid valves?
A: There are some components that you just shouldn't go cheap on. The Burkert 5404 valve works -- you're getting what you pay for. See #16.
Q: It seems that the Robot Marketplace no longer has any antweight sawblades. Do you know any place online where they sell them?
A: Stop by your local hardware store and browse their Makita circular saw blade selection. They make nice 4" blades that should do.
Q: Where can I find keyed hubs for the Carefree wheel setups Sewer Snake and other HWs use?
A: I know of no 'off-the-shelf' hub solutions for the carefree tires and rims. They are custom items, AFAIK. I'm sure that the Team Whyachi Bot Shop would be happy to make a set up to your specifications. You could also write to Matt Maxham at Team Plumb Crazy and ask him the specifics of his set-up.
Q: Does spray painting UHMW or Lexan have any negative affects such as melting it, or weakening the material?
A: Neither UHMW nor Lexan can be painted with conventional paints. It does not harm the plastic, but the materials are too slick and/or flexible for the paint to adhere correctly -- it flakes off. There is a special spray paint for plastics (Krylon Fusion) that might work for Lexan, but I don't know if you're going to have any luck painting UHMW polyethylene.
Q: are the replacable treads sold by vex a good tank treads for sumo robot?
A: Not for serious competition. Sumo is all about traction, and while the VEX upgrade tank treads offer improved traction over the stock VEX treads they fall well short of the grip available from custom polyurethane or silicone rubber tires/treads used by serious sumo competitors.
A: Too 'stretchy' - treads need dimensional stability to prevent distortion under load. Tank treads, by the way, need to be well supported along their entire contact length to be effective. If you just have a floppy tread between the two end sprockets you aren't gaining any traction.
Q: Could you recommend one tank treads for a full size sumo robots?
A: I don't compete in sumo, so I'm not current on components, but I don't know of any off-the-shelf tank treads that would be competitive.
I can recommend that you find a copy of Robot Sumo: The Official Guide by Pete Miles at your local library and read it. Like I said, serious sumo competitors make their own tires/treads. Pete's book give tips on how to do that and on how to modify available components to make them more competitive.
Date marker: May 2011
Q: what about the 6061 aluminum makes it popular for full body spinners?
A: I mentioned in an earlier post that 6061 alluminum alloy is a popular material for FBS shells. It has good strength and machnineability, it's easy to find in a wide range of forms, it welds reasonably well, and it's relatively inexpensive. Although not the strongest aluminum alloy, it is strong enough for the purpose and the other factors make it attractive to builders.
Q: What are your experiences with anodizing aluminum to get a nice color? Is it an okay idea, or does it make scratches and battle-scars more visible as cosmetic damage?
A: Robot combat isn't a beauty contest. Spend your time and effort on things that will help you win matches.
Note that the anodizing process adds a hard aluminum oxide layer to the surface, which does have some benefit. The basic anodized coating is colorless and does not highlight damage -- stick with that.
Q: I'm looking for shaft collars to mount my wheels, but they don't have the measurements for what size shaft they fit. Is there a good way to tell if it will fit or not?
A: There's no way to tell if a shaft collar is suitable for your application without the bore diameter. Try a different supplier to find what you need. Shaft collars are a common enough item that the hardware rack at your local home center may yield something useable.
Q: I'm trying to buy replacement pinions for the Magnum775 gearmotor distributed by RobotPower. I'm pretty sure it's a standard size but I just don't know how to interpret pitch and all the specs retailers use for pinions. Here's the what I could measure:
5mm bore diameter
Outside diameter: 0.3945 inches or 10.02mm
15 teeth
Thank you so much! Your site is very generous!
A: Mark J. here: from the diameter and tooth count, your gear is likely a 'mod 0.6' metric pitch (sometimes called a 'metric 48P'). Some hobby-grade R/C cars use metric gears; you may find something suitable at a well stocked R/C hobby supplier, but that bore diameter could be a problem. Hunting down a replacement gear can be very frustrating. Best luck.
Q: I've been looking at miter gears for a hobbyweight overhead bar spinner. I'm a little confused, because I can only find places that sell the two joining gears, and they do not come with a housing. Don't you need to make some sort of housing for miter gears to ensure that they don't slip apart, just like any gearbox?
A: You can buy individual gears and make your own housing, or you can buy a complete gearbox. There are just too many possible gear combinations to offer a range of housings to accomodate them all. Industrial suppliers like McMaster Carr sell complete right-angle gearboxes, but it's unlikely that you will find the combination of size, capacity, and ratio you require. Belt drives are much more adaptable, more robust, and generally much lighter.
Q: Building off of the miter gear question, how could you get a horizontally mounted motor to turn a vertically mounted shaft with a belt drive?
A: Mark J. here: it's called a quarter-turn belt drive (see diagram - discussion here). It isn't terribly compact and it cannot transmit as much power as a conventional parallel axle arrangement. You've stumbled upon the reason why there are few right-angle drive spinners: it's often easier to design a robot than it is to find the components needed to build it.
A good machinist can pull off all sorts of interesting designs. If you're forced to pick components 'off the shelf' your spectrum is more limited.
Q: What is a torque limiter? Are they suitable for robot combat?
A: A torque limiter is a mechanical device that will 'slip' when torque reaches a specific level, preventing damage to components that can only handle a certain amount of torque. Many designs exist -- a toothless belt that slips at high torque, tires that 'break traction' before the motor stalls, friction clutches, ball detent mechanisms, etc. The first two examples are commonly used in robot combat.
Q: Do you know any were where i can buy a 10:1 gear set fo an antweight robot? Thanks alot!
A: Your local hobby shop may have a selection of small gears. You'll need to find gears that have suitable bore diameters to match your motor and drive shafts. Also, 10:1 in a single reduction stage will require a large diameter spur or crown gear that may be too large for your selected wheels -- a two-stage reduction may be required to get the drivetrain compact enough to be useful.
Most antweights use a pre-matched motor and gearbox (gearmotor) to simplify their gear reduction needs. Tamiya make inexpensive configurable gearboxes in a wide range of reduction ratios that might suit your project.
Q: Is 'The Robot Marketplace' a good source for robot parts?
A: See #16.
Q: Would aircraft grade aluminum be good for an antwight spinner killer plow? If not, is there anything better that isn't too expensive, but not overly cheap?
A: Mark J. here: material for a spinner killer scoop needs two attributes: hardness and resilience. Aluminum has neither. The commonly available 'aircraft grade' alloys have a Brinell hardness less than a third that of S7 steel and a fracture toughness about a third that of titanium alloy. A proper spinner impact tooth would dig in, grip, and hurl an aluminum scoop.
The material of choice for a spinner killer scoop is 6Al-4V titanium alloy. A quick check at Titanium Joe shows they currently have a scrap piece of 0.120" 6AL-4V big enough to make about three ant scoops for less than $25. Form your scoop, then heat treat to 36HRc. If the titanium is too expensive, good old chrome moly steel heat treated to 39HRc will get the job done.
Q: Dear Aaron i just got back from motorama 2011 and i lost i should have paid more attention to what you have told me and you were right . my drive train was slow and my armor was too heavy so this setup prevented me from from using the weapon motor that i wanted to use plus my battery. p.s but i managed to put a mediem size dent in tramatizers uhmw top armor and i mistakenly used a heavy cutting board for my base plate but on the postive side i still manged to drive on till the last match and then i quit and left motorama p.s should i still use uhmw or should i move on to arospace materials like titanium i have plenty of money to spare and i have learned how to machine it properly from other builders at the tournament.....thanks Aaron
A: You have plenty of things to work on without adding new materials to your list, Anthony. It sounds like the materials you had held up well enough to get you thru the tournament. Improve the things that didn't work before you tamper with the things that did.
Q: Hi Aaron, I am creating a antweight robot. And I was thinking about using carbon fiber, if I used carbon fiber, when I drill a hole would the carbon fiber shatter?
A: Cutting or drilling carbon fiber composite (CFC) is very much like working with wood - it won't shatter, but it can splinter around the edges of your cut. Use very sharp drill bits, fine-toothed saws, and take your time. Don't breathe the dust or get it in your eyes. Seriously!
Q: Are the banebots 30A tire suitable for 3kg sumo robot competition?
A: That depends on how serious you are and what the rules allow at the competition you plan to enter. Serious sumo competitors cast their own tires from polyurethane resin or silicone rubber. Search the archive for 'effective design' for tire links and options.
Q: How do i build ramming spikes for my bot?
A: That would depend on how large your 'bot is, wouldn't it? See the previous question on spikes in this archive - search for 'steel spikes'.
Q: Hey Aaron, what is your opinion on using carbon fiber for the chassis of a robot? I have seen it used often in the lighter weight classes, but not very often (if at all) in my 15lb weight class. A foam, wood, or honeycomb core is looking very appealing because of the save in weight it would mean. I know that carbon fiber is extremely strong and rigid, but I have also heard that it can be brittle so it should not be used in places that require high impact strength (aka combat robotics).
Thanks so much for the advice!
A: You don't see carbon fiber composite used much in the heavier weight classes because... well, have you priced the stuff? It is a wonderfully strong, light, and stiff material. When it does fail it shatters like glass, but the force needed to cause that failure would twist comparable weight structures of most other materials like a pretzel.
The common problem leading to failure is that builders confuse the extreme stiffness for high yield strength and use material that is too thin. If you correctly design with adequate thickness for the stress loading, you won't need to worry about brittleness.
If the price for CF proves too much for your budget, you may want to consider garolite as a more affordable substitute. Nearly as strong and stiff, but its failure mode is a little less dramatic. Seach this archive for 'garolite'.
Q: Under your materials guide, you mention that UHMW Polyethylene can be used for motor mounts. However, I thought that plastics such as UHMW are weak around points with drill holes. Would Polyethylene really be a good substitute for a motor mount made of, say, aluminum? It is very light and would be tremendously helpful to use if it functioned properly. Isn't there a lot of stress going to the motor mounts when the 'bot is pushing against something?
A: Plastics vary a great deal in their material properties. UHMW Polyethylene has enormous capacity to absorb shock loading and is not particularly subject to the drill hole weakness that is common with other plastics; the stuff simply will not crack. UHMW clamp mounts for fairly large motors are commercially available.
UHMW mounts do need to be larger and of a different design than mounts made from aluminum would be in order to provide strength and rigidity, but the material is so light that you can still save considerable weight. Take a look a the motor mounts available from 'Team Tiki' for an example of correct UHMW mount design.
Q: Would textured sheet aluminum be suitible armor for a beetle weight?
A: All the textured sheet, extruded angles, and flashing that you buy at the hardware store is '3003' aluminum alloy - soft, easy to bend, and unsuitable for robot armor. Some specialty hardware stores may have flat sheets of '6061' aluminum; it will be clearly labeled with its alloy type. Although not the strongest aluminum alloy, 6061 is far, far better than 3003. See our armor guide for some guidance on acceptable alloys. There are also multiple on-line sources for high strength alloys.
Q: I've been constructing a pneumatics system in a 15 lb class that can only used compressed air. I have found a very fitting CO2 tank that works perfectly with my design. However, I've heard that you should not fill a CO2 tank with compressed air. Is this true, and why? My limit is 150psi, which doesn't come even close to the CO2 tank's rating of 3,000psi.
A: I'm guessing that this is a paintball CO2 tank. It will weigh more than a tank built for lower pressure, but if it works well with your design you can certainly use if for compressed air.
Warnings against use of tanks intended for other gasses apply to larger tanks that are color coded for the gas they contain. Confusion about what gas the cylinder contains may create safety concerns in industrial or medical applications.
Q: can UHMW be used as bearings?
A: UHMW polyethylene is a very 'slick' material - comparable to teflon. It is also soft. UHMW bearings can be used for relatively low pressure, low temperature applications.
Q: Is it suitable to be use in a 3kg sumo? In terms of using UHMW as both bearing and frame?
A: I know nothing about your design and so cannot comment on the suitability of a specific material. See #17.
Q: Previously you wrote:
Q: What's the ideal material to use in a lightweight spinner killer's wedge?
A: 6AL-4V titanium, about 5/16" thick should do."
So, what about a heavyweight?
A: That previous post was from several years ago and was a 'flip' answer to far too general a question. It was an 'ideal' material because nobody could get into too much trouble with a chunk of 5/16" thick 6AL-4V strapped on the front of their lightweight, irrespective of the design or angle. It was a safe, overkill answer - but I no longer consider that type of answer to be helpful.
Like it says in #17, "We aren't an engineering service. Even if we were, no competent engineer would spec material or thickness before knowing a great deal more about the design than you have told us." Read the rest of FAQ #17 for some advice that is helpful.
Q: Can a pulley that was made to be an idler function as an ordinary pulley?
A: I can't give you a general answer. It depends on the type of belt used and whether the idler was designed to go on the inside or outside of the belt path.
Q: Is it true you can drill screws into a robot's wheels to increase its traction? Do you recommend it?
A: Exposed screws sticking out of your tires works really well to increase traction -- if the arena has a floor made of ice or compacted snow. You might also get some additional traction in heavy turf. For other conditions forget about the screws.
Q: I want to use six of the large Yak wheels on a 30lb ram/wedge. Would one Team Delta 18 volt Dewalt Powerdrive kit on each side of the robot be enough to move them fast enough?
A: Really? Those Yaks weigh 22 ounces each. That's 10 pounds of wheels on a 30 pound robot -- extreme overkill! A set of six Colson 4" wheels would give comparable performance and weigh only 1.5 pounds.
Speed and power with two DeWalt Powerdrives would not be a problem. The
Team Tentacle Torque & Amp-Hour Calculator
reports a top speed over 22 MPH at 24 volts with the gearboxes in 'high' range. Acceleration is good, reaching about 17 MPH in a 16' by 16' arena. That's plenty quick and fast for a featherweight rammer.
Q: When you say high gear do you mean the 15.3125:1 gear ratio? I used the 45.9375:1 in the Enigma Electric Drivetrain Simulator and the robot was slow. But the 45.9375:1 is listed as the high gear ratio at robot marketplace.
A: I'm referring to 'high' as it is listed in the referenced Team Tentacle Torque & Amp-Hour Calculator: that's the 'high speed' 15.3:1 ratio. Some sources use 'high' and 'low' to refer to the gear reduction ratio rather than the output speed. This does cause confusion!
Q: Do you have any advice for working with titianium? ie How to cut it and drill it?
A: We've discussed working with titanium previously in this archive. Briefly: use very sharp tools, reduced tool speed, firm pressure, and a cutting lubricant.
Q: Hi Aaron. I understand that there are certain types of loctite that come in red and blue colors. Is there a particular difference or strength between the two?
A: There are many different types of Loctite threadlocker in purple, green, black, blue, and red colors! For most combat robot applications you'll probably want to use the standard and widely available medium strength Loctite 242 blue threadlocker.
High strength red threadlockers create a 'permanent' bond which may require heating the fastener with a torch to remove. Don't use this on anything you might want to take apart in a hurry!
Low strength purple threadlockers are generally for small, fine thread fasteners. There's even a special low strength version for plastic screws.
For full information, download selection guides for Loctite and Permatex threadlocker products.
Q: Many books mention that people insert "hardened pins" into their weapon hubs to prevent the force of the impact from transfering into the fasteners and destroying them. What exactly do they mean by "hardened pin?" Where do I get one? And how do you prevent the pin from falling out of the hole you put it in?
A: Machine screws are designed for strength along their long axis and have poor strength when exposed to impact shear forces across their diameter. They are intended to hold things together, not to resist the motion of two things sliding relative to each other. Common techniques for preventing hubs from turning on shafts include pins, splines, and keyways.
A hardened pin is a short length of steel rod that has been case hardened to create a very hard surface while retaining impact toughness in the deeper metal. These pins are made just a bit oversize for the hole they fit into so that they must be pressed into place, which holds them secure. The pin typically passes thru the shaft and engages the hub on either side.
Case hardened steel pins can be purchased in a variety of sizes thru most suppliers of mechanical fasteners, such as McMaster-Carr. Keyed shafts and key material are available thru the Robot Marketplace.
Note that keys work well with relatively large shafts. Pins can be used with smaller shafts but drilling a hole thru a very small shaft is difficult and it weakens the shaft. The smaller the shaft, the more difficult the problem of preventing hub rotation becomes. Pretty much every robot builder has learned for themselves that 'set screws suck'.
Q: The thickest aluminum I found at Lowes was 0.1". It is Steelworks Brite Aluminum Tread Plate, the stuff truck toolboxesare made out of. Is it usable for an antweight wedge, braced by pine wood triangles, attatched to the plastic front of a Battlebots toy, at 35 degrees with three machine screws to do the attatching? Also, do you know what alloy it is?
A: Mark J here: The alloy is most likely 3003, which is not heat-treatable and is about 1/3 as hard and tough as 6061-T6 aluminum. It's intended to be bendable for use as decorative trim. I don't recommend this material for combat robotics.
There are several on-line suppliers of proper aircraft grade aluminum alloys in small quantities.
Q: Okay thanks. Its just that Online Metals is in Seattle and I'm in NC so shipping is huge! But I will do it anyway... One last question. My dad told me about this foam they make to seal crevices in windows that then hardens into a solid. He said it is strong like wood but a lot more lightweight. Could I use that underneath my wedge for support? I still want 2 or 3 small, narrow wood triangle peices to hold the wedge down, but could I fill the gaps in between with that stuff?
A: There is nothing magical about aluminum alloy for your wedge. If it's becoming difficult and/or expensive to obtain the correct aluminum alloy, consider switching to something else. A kitchen cleaver from a dollar store or thrift shop can be cut up to make a great ant wedge.
That insulation foam is gooey, difficult to work with, and it would make any needed repairs to the wedge structure difficult. The place your wedge needs support is along the leading edge -- gap filling between the wooden supports isn't going to add much strength there. The foam doesn't weigh much, but I think I'd use that weight someplace else.
Q: How about a spatula or, as it was called at the Dollar Tree, a "cookie turner?" I didnt see any cleavers, or other large knives...Also, what are cleavers made out of, stainless steel? Thanks.
A: Inexpensive kitchen knives are usually made from 430 stainless steel. This alloy is not as hard as high carbon steel and will not hold an edge as well, but it is fairly tough and resilient. The 'cookie turner' is likely made from the same material, but thinner. I'm a little worried about it being too thin, but if the size is right it could be worth a try.
Q: Hello,
This Question regards hobbyweight armor, I have read this question website for a while so I know that I should "make it as thick as possible" but I am wondering if 4130 Steel would be good armor in a hobbyweight? this would be a drum bot so the steel would pretty much be the basic structure (containing everything, and put the bearings in for drum), I would put UHMW, and Ti around it eventually. I will make it as thick as possible but since it is quite heavy the thickness range would be from .1" to .2", I belive it should be good enough re-enforced but I would like to get a second opinion from an experienced robot builder. Thank you!
A: See #17. I really can't offer guidance on the suitability of a material for a design about which I know so little. I can tell you that steel is not widely used as chassis or armor material in hobbyweights. The advantage 4130 'chrome moly' steel has over other inexpensive steel alloys is its ability to be 'surface hardened' for durability while retaining good toughness. If you're not going to have it hardened I would suggest other alloys. Look to materials used by other hobbyweight builders for guideance.
Q: As to more info, the bot will be a hobbyweight drum bot. It will be as simple as possible, so it kinda looks like the letter "H" just with one end covered and the drum in/on the other end. The side rails (right and left, longer), will be 10in by 1.5in long Not sure how thick.... the two others (one between and other at end) will be 7in by 1.5in. One of the smaller pieces will 7inches in from the armored end leaving 3in for drum space. so pretty much a 7in by 7in box with two three inch arms at one end. Thats the design, I browsed an online metals supplier and found "hot", and "cold" roll. In my other bots I have only used AL so I have little no experience with steel. So I would like to have a welded steel frame this time. I also tried to look at other bots but I just cant find that much info on them... Could you please recommend a solid, strong weldable alloy of steel? Thank you very much!
A: Mark J here: like it says in #17, "We aren't an engineering service." Aaron didn't ask you for more info. If you sent us complete design drawings we still couldn't recommend specific materials or thicknesses.
I can tell you the differences between 'hot rolled' and 'cold rolled'. Cold rolled has a nicer surface finish, tighter dimensional tollerences, and a sleight increase in hardness from being 'cold worked'. It is also about twice as expensive as hot rolled. Some types of steel are available as either hot or cold rolled while others come only one way.
I'm having trouble following the description of your design, but it sounds like too complex a shape to heat treat without the risk of serious warping. Even welding a structure like this may cause warping. You'll want a steel with low distortion characteristics as well as good weldability and high toughness without heat treating.
Your final decision may come down to availability. Small quantities of a specific steel in the form and thickness you require can be difficult to find. Something like 1025 steel would be a good choice, but a quick search of on-line suppliers didn't turn up any sheets in the thickness you're thinking about. Chrome moly 4130 is more expensive and kind of a waste since you're not going to be able to have the structure hardened, but it is widely available and has many of the properties you're looking for.
As Aaron pointed out, steel is not commonly used for hobbyweights. Sub-light builders have found drawbacks to the use of steel and you're likely going to re-discover those same problems. I think the hamburger is bad, but if you really want to build a steel hobbyweight don't let me stop you.
Thank you! I Just ordered about $10 worth of 1018, so I will try it and see what happens. I can always replace it as I am not using a lot of it. Thanks again!
Q: I don't know much about what other people use for axles, but for my 30 lb combat "robot" I'm thinking of using 3/8" nylon rod or UHMW rod. The bushings in my wheel/pulley combo are made out of nylon, so I figured this combination would give less friction than using a metal axle (also cutting down a small amount of weight).
The axle will be supported within 1/32" of each side of the pulley/wheel (which has a solid bushing through it) so there will be little to no bending forces, only shear. 3/8" plastic should hold up under these conditions for an axle, right?
A: Builders generally use steel for axles. You have a special case: a stationary axle with a wheel/pulley assembly turning freely on it and supported closely on both sides. I'd still go with steel axles for several reasons:
For all the plastics for which I could find data, the coefficient of friction for plastic on plastic is no less than (and sometimes greater than) polished steel on plastic. Add a spot of silicone grease: a well-lubricated bushing is a happy bushing.
Those shear forces you mention are not insubstantial. If the axle does not break, it could still stretch, deform, and bind or crack the hub for lack of support.
I've seen a lot of materials that 'should hold up' fail spectacularly in combat. If I used plastic and it failed, I'd feel really stupid.
I don't think it's worth the risk. You're saving very little weight and risking failure at a high-stress part of the robot. Steel!
Q: What battery from the Robot Marketplace do you reccomend for a 4-wheel drive Beetleweight rambot and what quanity?
A: I can't recommend a battery based on weight and the number of wheels driven! The
Team Tentacle Torque & Amp-Hour Calculator can estimate both peak amperage consumption and total amp-hour requirement for a robot based on weight, motors, voltage, gearing, and match length. Enter the values for your robot, then click on 'Battery Chooser'. Write down the needed capacities and go shopping!
A: I don't have a set to test, but I'd guess 'no'. The unspecified 'rubber' is fairly hard (Shore A 45) and is not likely to compare well to the specialized traction compounds used in sumo. The treads should be fine for general robotics, but I wouldn't get into a pushing contest with them.
Q: Then any recommendation for a suitable tank track?
A: Treads (as commonly implemented) do not offer any real traction advantage on an even and clean surface like a sumo dohyo. If they did, they would be seen much more often than they are.
If you are determined to try a set, the Lynxmotion treads look like a good start. You'll need to replace the rubber compound on each segment with custom molded polyurethane or silicone to stand a chance against real sumo tires. There are no competitive 'off-the-shelf' sumo treads out there, AFAIK.
Q: Okay, but oyher than lynxmotion treads, is there any other possible solution for tank treads? the sumo ring is covered with hard rubber.
A: I REALLY DON'T RECOMMEND TANK TREADS! Unless you have a method to evenly load weight over the entire footprint of the tread, you will not have any advantage over wheels. There are some treads available thru Robot Marketplace, but nothing well suited to sumo.
Q: I recently saw a show about beans, and they showed a soy based plastic stand up to an axe and a bowling ball drop from 4 feet. Would it be good for a lightweight rammer thats meant to take a lot of abuse? And if so any websites where to get it?
A: I didn't see the demonstration of how tough the soy plastic was, but I feel safe in saying that it's not tougher than polycarbonate. Properly mounted, polycarbonate makes great armor -- and so does UHMW polyethylene. See our Armor Guide for more info.
Q: How big is the U.S. General Master Power Switch found on robotmarketplace???
A: It's approximately 2.25" diameter by 4" deep, including the key.
Q: You always say 'cheap and combat robot don't go together', but in a previous post someone asked for an inexpensive servo and you did not say this. Does this rule apply only to some materials but not others?
A: 'Inexpensive' isn't the same thing as 'cheap'. The questioner didn't say why he wanted an inexpensive servo and didn't ask for an opinion on a specific servo. There are applications where a standard $10 servo will work just fine -- I hacked a pair to power my antweight 'Rat Amok' and they worked out great. A pair of $90 titanium geared super-servos would not have been any better in that application. Like it says in #16, with experience you'll learn where you can save money and where you need to buy the good stuff.
Q: Would a 12x12 .325 sheet of 7075 aluminum be good for a chassis of a lightweight robot? If you say you don't have enough info about the design then will you just tell me if its good or not?
A: Mark J here: you aren't getting it. I can't tell you if a specific material of given thickness would be 'good' or not. I can think of designs for which that piece of aluminum would make a good baseplate, and I can think of designs for which it would be unacceptable. I will comment that 12" by 12" is quite small for a 60 pound lightweight, and that 7075 aluminum is a very strong alloy that is entirely suitable for a wide range of robot construction and armor applications.
Q: Would kevlar, carbon fiber, and titanium be a good composite material?
A: NO! The carbon fiber is by far the stiffest material and would take all the load until it failed. Only then could the other materials come into play.
See earlier questions on composite armor in this archive.
Q: Does the UMHW you can buy at online metals have the exact same mechanical properties as cutting board material?
A: Polyethylene cutting boards may be made from various grades of material, usually HDPE (High Density Polyethylene) or UHMW (Ultra High Molecular Weight polyethylene). There are variances in mechanical properties with different manufacturing processes, so I can't promise 'exact' duplication even assuming that the cutting board in question is made of UHMW.
Q: A question concerning wheels and tires: Do pnumatic tires, like the ones on 'Tornado' (british heavyweight) have an advantage in grip over solid rubber tires? And does the flexibility of being able to change the pressure inside the tire depending on circumstances make pnumatic tires a worthwhile consideration for a combat robot?
Also in a somewhat tangential direction: do weight-classes effect the prefered tire type?
A: Pneumatic tires don't have any particular grip advantage over solid, foam, or semi-pneumatic construction for typical combat arena use. They are generally lighter than an equivalent sized solid tire but have the disadvantage of being 'shredable'.
Adjustment of tire pressure to match conditions is not much of an issue in combat robots as the tires are loaded to only a small fraction of the tire rating. More than just a couple pounds of pressure will make the tires too 'bouncy' when so lightly loaded (we leaned this the hard way). Many teams use 'pneumatic' tires bonded to the wheels with no air pressure at all, and perhaps a donut of foam rubber inside.
The selection of a tire type is usually a simple matter of what can be found in the desired size range. Some weight classes have more choice than others. The tire compound and durability are generally more important than the construction design.
Q: Hey Sir, I hate to ask you to help me find parts but I'm pulling my hair out trying to find 6mm Fully Keyed shafts. Robot Marketplace has 1/2" and McMasterCarr has 8mm but no 6mm. Its for a drive-train. I'm trying to use the banebot 6mm hubs and the fingertech timing pulleys. If I could come up with round key stock I could send them off to get the keyway machined but I'm having a hard time finding keystock as well. Any idea where in the world there hiding all the keyed shafts?
A: A 6mm keyed shaft is a challenge. Have you considered going to 1/4" shaft instead? The 3mm bore Finger Tech pulleys can be drilled out to 1/4" just as well as 6mm, the BaneBots hubs are available in 1/4", and McMasterCarr has fully keyed 1/4" shaft in stock.
If you're determined to go 6mm, try asking around the on-line forums to see if someone has a couple of dead 28mm BaneBots gearmotors with good shafts they are willing to sell.
Q: Would it be a good idea to hard anodize frame parts for my beetlweight to make it stiffer? What is hard anodizing, as I constantly see it on R/C crawler magazines?
A: Mark J. here: hard anodizing is an electrochemical process that creates a wear resistant oxide coating on the surface of aluminum that is thicker than the oxide layer that naturally forms. This thicker oxide layer resists corrosion and increases surface hardness, but the layer is only a few micrometers thick and does not appreciably modify the overall strength or stiffness of the material.
The purpose of R/C magazines is (IMHO) to hype advertiser products and sell you stuff. You would do well to ignore what you see there.
Q: Where can I get a fisher-price gearbox with motor?
A: From what - the Power Wheels riding toys? Entering "Fisher-Price gearbox" into your favorite web browser will give multiple sources. There are several offered on EBay.
Q: I would like to know if the colson wheels offer good traction on hard rubber surface?
A: Colson wheels are rugged, inexpensive, and offer good (not great) traction on clean firm surfaces.
Q: Then which types of wheels offer great traction on rubber surface?? What wheels will you recommend?
A: It's really difficult to recommend a robot component when I haven't been told the details of your competition or design. Am I recommending for an antweight or a heavyweight? Is this a sumo or combat application? Will the surface be very clean or the usual dusty and gritty slop? You have to give me a chance at a reasonable answer.
Q: The robot is a sumo robot, 3kg. The field is a wooden ring with a hard rubber coating on the surface. the surface is supposedly to be a bit dirty.
A: We don't compete in sumo, but I know a couple of things about traction.
Dirty is a problem. Very grippy tires will pick up dirt and quickly become less effective than more conventional tires.
The top sumo competitors mold their own urethane formulations to match surface conditions. See the tire molding article at Roko.ca for tips and links.
Q: Which would be more resilient to impact damage in an exposed bot: 1.5x1.5 0.125 inch wall thickness 6061 T6 aluminum tube, or 1.5x1.5 0.049 inch wall thickness 4130 chro-moly steel?
A: Mark J. here: we are not an engineering service, but I can tell you that steel and aluminum have different strengths and weaknesses which makes a simple 'resilience' comparison difficult. The thicker 6061 T6 aluminum has greater tensile and yield strength than the 4130 steel -- but the thinner steel is stiffer, more shear-resistant, and has greater surface hardness. Additional differences will depend on the heat treatment used on the 4130 steel.
Q: Is the traction treads sold by IFI robotics a good wheel for sumo robots?
A: We don't compete in sumo, but I do know that the sumo guys use custom molded urethane traction compounds that really push the limits of traction. The IFI wheels also look too heavy/rugged for sumo use -- the smallest size weighs more than half a pound.
Q: then is there anyway to get one of those treads used on the beast build by carlo ?
A: As I recall, Carlo Bertocchini made the treads on his sumo robot 'Beast' out of pure gum rubber; one-off custom items. They may not be legal under current sumo rules on allowable traction compounds.
Q: IS the wheels sold by team whyachi offer good traction on wooden surface covered by 3mm thick of hard rubber?
A: We have no experience with either the Team Whyachi wheels or hard rubber surfaces. Suggest you check your local library for a copy of Robot Sumo: The Official Guide by Pete Miles for general information on sumo traction solutions.
Q: Hi, I have a 6Al-4V titanium disc for my beetleweight that has some chips in it and is pretty dull. Is it a good idea to weld some ti to the chipped teeth and build them back up again? Could I use 6Al-4V to fill the chips or would I have to use grade 2 titanium to avoid cracking? Thank you.
A: We have no experience in welding titanium, so cannot offer advice on how your repairs would best be done. You might consider taking this opportunity to convert to bolt-on steel impact teeth. Spinners in heavier weighclasses generally have bolt-on impactors that can be replaced easily.
Q: Hi Aaron. I have some scrap Inconel-625 and was wondering if it is good insect [class] armor? Thank you.
A: Inconel is a specialized corrosion and heat resistant alloy designed for extreme environments. If you were fighting a robot armed with a plasma torch and an acid spray it would be your material of choice. Its physical properties are similar to a high-strength aluminum alloy, but it weighs three times as much. Verdict: too heavy to be good robot armor.
Q: I read in a 1998 publication that you can make tires for robots by nailing bits of garden hose directly to the wheels. Is this at all feasible, and if so, is it still done today?
A: What publication might that be? Did they also tell you about using Cheeze Whiz to glue crackers to your robot for armor? Garden hose section tires might be useable for a hobby robot that crawls around in your back yard, but don't even consider it for combat.
Q: Hi, Garden Hose question guy here. The publication was the Robot Wars Technical Manual - I didn't mention the name out of respect for your bulletin. Can you recommend any better way to make wheels from scratch, because I don't have any lawnmowers or electric wheelchairs that I can strip the wheels off of.
A: I'm really hesitant to recommend scratch-built wheels. Tell me more about your robot so that I can have some idea of the stress these wheels are going to have to put up with. I've seen a great many combat robots fail due to poor wheels and hubs, and there is no shortage of sources for workable wheels.
Q: For an Ant would 1/8 in. Lexan work for top armor or could I go smaller?, Thanks
A: You're in the right ballpark, but I can't comment further because I do not know the details of your design. See #17.
Q: I am consitering making a drum using carbite teeth from a saw blade that would be stagered along the drum or using a jointed planer blade like mowbee's only I would carbanise it. I figure that the one with the teeth would work better on wedges but the mowbee like one would work better on vertical blades, what's your take on it which one do you think would be better?
A: Mark J. here: have you stopped to wonder why nobody uses carbide impact surfaces on combat robot weapons? Tungsten carbide is extremely hard and wears very little when used to cut thru materials under constant pressure -- but it shatters on hard impact. It is not suitable for the applications you propose -- choose another material.
Q: Where can I find gravedigger spikes like the ones on the Juggerbot machines?
A: Team JuggerBot fabricated their own. I suspect you'll need to do the same. It might be worth an email to Mike Morrow at Team JuggerBot -- last time I was there Mike was trying to clean out some excess stuff from his workshop and there might be some spikes lying around.
Q: What kind of linear actuator did minion use for its srimec in Battlebots 5.0?
A: You'll need to ask Christian Carlberg. I don't have current contact info for him.
Q: for my question on cardboard robots, do you know of any cardboard that can hold up a 1lb sledge? I'm gonna make a bot based of the judge. Also has the team that made the judge made any other bots?
A: Sorry, we aren't experts on cardboard. There were two versions of 'The Judge', but no other combat robots the Mechanicus team.
Q: I know you usualy don't answer odd questions like this, but me and my friends like building cardboard robots attatched to string and I was wondering, do you know any materials that could hold up to cardboard and wood that I could build a succsesfull 4-bar lifter out of?
A: String-powered cardboard and wood robots? I like it! No point in going hi-tech with your lifter materials - wood can stand up to wood. You don't mention how big these robots are, but something like K-nex construction pieces could also work well and just snap together.
Q: Thanks, I [don't] think K-nex would work because the bots are about the size of UK heavyweights. would it work to use a 4-bar,but have the scoop on the back so it scoops them up with the lifter up, then fire it down?
A: Ahhh... BIG cardboard robots. I can't quite picture the 4-bar system you are describing, so can't comment.
Q: Aaron, where did you get the spatula that you used for 'Zpatula's lifter?
A: The spatula came from an end-of-season clearance in the barbeque department at a local department store. I shortened the steel blade by about four inches.
Q: Can you send more pictures of 'Zpatula'?
A: If you have specific questions that can be answered best by a photo I will post that photo here.
Q: would tin foil packed REALY! hard be a good wedge? It's been done but is it effective?
A: No!
With all the easy-to-obtain good materials, why do some builders insist on armoring their robots with something they find next to sandwich bags at the supermarket?
Q: Hi Aaron. I'm building a Featherweight and I would like to use steel as my bots wedge. Problem is that I live in Canby Or, and I'm afraid of rust. Do I need to remove the rust? If I can, how can I remove it?
A: Yes it's wet here in Oregon, but don't fear the rust! If you're starting with rust-free steel, a wiped-on coating of oil will keep the rust away. If your steel is already rusty, some steel wool or a wire brush will quickly remove the surface rust. You can leave the rust in place for a 'scrapyard' look if that suits you.
Q: Whats a good spinner killer's wedge made out of? Many people use titanium, but I would think S7 is better. It doesn't absorb and elongate like titanium, so it transfers all of its energy back into the spinner. What do you think?
A: Mark J. here: first, large plates of S7 tool steel are not available. The heat-treating process the material must go thru would warp large plates. S7 is made for small impact points.
Second, S7 is relatively brittle. A large plate would be prone to shatter. Do not confuse 'hardness' with 'toughness'.
Last, Newtonian physics says that there is no such thing as 'transferring back all of the energy'. Equal and opposite reaction is the rule -- your robot will take as much of a hit as you can transfer back to your spinner opponent. An effective spinner killer does not seek to subject itself to such destructive Newtonian reaction. The idea is to let the wedge/scoop deform to absorb energy and deplete the spinner so you can shove it around without harm. Titanium alloy is the boss for this application.
Q: would a cardboard, packing tape,tin foil, and scotch tape mesh armour be could spinner defense in the lightweight class? I'm building a bot for the 2010 battlebots and I don't expect to do well, but I want to atleast win one fight.
A: Not even close. Each component of composite armor must be carefully selected to add to the overall strength properties of the material. What do scotch tape and tin foil add?? See our comments about composite armor in this archive.
Q: Why don't people use lexan anymore? In Kickin Bot, Grant Imahara said lexan was amazing, but in the Riobotz tutorial, they say lexan is inferior. Has armor evolved over the years, although no new materials have been introduced?
A: Mark J. here: Grant is correct - Lexan is amazing. The problem is that many builders do not understand how to properly use the material. If you treat it like you would a chunk of metal by drilling a few mounting holes in it and bolting it down firmly, it will fail at the mounting points. For this reason it has gained a poor reputation. If built into a structure by chemical welding, the result is a chassis that will absorb huge impacts and come back for more.
The Riobotz tutorial authors take a traditional engineering approach to their evaluation of materials which looks for rigidity as a measure of strength. This approach overlooks the enormous energy absorbtion potential Lexan provides when allowed to flex. There are a number of things in their tutorial with which I disagree.
Proper use of Lexan polycarbonate requires special techniques not famillar to metalworkers. If you are willing to discover and use those techniques, Lexan can be used to great advantage.
Q: [Chinese Forum] Why do Team Hurtz take so much inetrest in using Lexan Armour? Cause they think Lexan is potential or just the weight problem?
A: Team Hurtz knows how to use Lexan. They know how to weld the structure together, they know how to design for flexibility, and they know where Lexan can and cannot be well used. They also know where to use other materials and how to combine them with the polycarbonate structure. This has served them well.
Q: Where did megabyte find his battery for the ETEK motor?
A: Pit photos show 'Megabyte' running four BattlePacks from Robotic Power Solutions. Their website text hints that they ran the Etek at 60 volts, but the battery set-up looks like a more standard 48 volts. Several sources will build custom NiMhd or NiCad battery packs to your specifications.
Q: WHERE CAN I BUY A PNEUMATIC CYLINDER THAT RUNS AT 4500 PSI? THANKS
A: Mark J. here: I'm not comfortable giving out that information. If you knew enough to safely build such a potentially dangerous system, you'd already know where to get the pieces. It's the same reason I don't give info on how to build flame weapons.
P.S. - I'd feel a little better if you knew how to turn off your Caps Lock key.
Q: This may sound odd but would floppy disk cases be okay armor for an antweight? thanks
A: I make them better than graham crackers but not as good as a soup can. ABS plastic: far too thin, way too flexible.
Q: I just got a pair of Whyachi T-boxes with some older small johnson motors mounted and some spare motors, So I replaced the older motors with the newer ones and now my gearbox doesnt seem to be working... when I turn the wheel it only moves about a half of an inch CW and CCW before it "stalls" Not under power it just doesnt turn. Any advice on what the problem is?
A: I'll assume the gearbox spins freely when the motor is removed? Possible problems:
wrong pinion gear on new motor shaft;
new motor shaft too long;
improper motor mounting hardware interfering with gear rotation;
foreign object fell into gearbox when replacing motor.
Q: [Chinese Forum] Does Care-Free wheels are perfect stuff to build a bot with good mobility? It seems some teams like Inertia-Labs and Sharpnel are very keen on using it...
A: Carefree Tires are made of centrifugally molded polyurethane foam which produces a lightweight, flatproof tire with a firm tread and flexible sidewalls. They take a great deal of abuse. We used them for front tires on heavyweight 'Run Away' in the second Robot Wars Extreme Warriors. Their downside is relatively poor traction compared to a conventional rubber tire of the same size. Some teams buff down the outer tread to get to a spongy layer with greater traction. I wouldn't call them 'perfect', but they do have their uses.
Q: In terms of traction, would four mecanum wheels such as those sold by Fingertech Robotics be preferable to three or four ominwheels?
A: Mark J. here: neither Mecanum wheels nor omniwheels are known for a lot of traction, and neither design has an apparent theoretical advantage. The Fingertech Mecanum wheels have actual rubber rollers instead of the hard urethane rollers commonly found in omniwheels, so I'd give them a potential traction advantage. Clean the rollers before every match!
Q: Whats the difference between planetary gearboxes for motors versus spur gearboxes? Is one better than the other?
A: Go have a look at the How Stuff Works page on gears for some useful diagrams showing spur and planetary gear arrangements. Planetary gearboxes spread the load over more gear contacts than a comparable spur gear drivetrain and are generally better able to put up with the abuse of robot combat. The down side is that a planetaty gearbox is less efficient than a spur gearbox, wasting more power to friction.
Q: Where can I get a linear actuator for a beetle lifter?
A: Very small linear actuators do exist, but you may get better power and speed by using a high torque servo or gearmotor in a 4-bar lifter design.
Q: Hi Aaron! I am building an ant spinning drum. Would bearings work well, or would I use a hole drilled in my 1/4" aluminum? Thanks.
A: You'll be spinning that drum too fast to rely on just aluminum running against your axle material. Most builders like to use ball bearings for drum support, and that will work well. Oilite bushings are another option; they are less expensive than bearings and a little more sturdy under heavy impact loading.
Q: My weight budget-and what is avalible-will allow .125" 6AL-4V or .1875" Grade 2 titanium. Should I go for thickness or the better material?
A: Just to clarify, the density of the various titanium alloys are almost the same so the real issue here is your availability. Grade 2 has a yield strength less than 1/3 that of 6AL-4V -- it is far inferior for armor. Go with 6AL-V4.
Q: Would balsa wood covered by 2024 aluminum be sufficient armour for an antweight?
A: Composite armor (two materials used together) is very tricky to get right -- see the discussion further down in this archive. You'd likely do better to leave the balsa off as it adds neither toughness nor impact resistance to the aluminum.
Look at what other builders are using for armor. I don't think you'll find anyone using aluminum/balsa composite.
Q: About the balsa composite, the balsa would be the frame and the 2024 aluminum would be the armour -not both for armour. Thanks.
A: I'd re-think the whole balsa wood concept. Balsa is strong for its weight, but it has low shear resistance and does not absorb impact well. Consider what a balsa glider looks like after a crash.
Q: I am looking to buy .071" thick 2024-T3 alumminum for a wedge on the Inertia Labs antweight. Is that thick enough and if so, how can I bend it? Thanks!
A: I can't comment on 'thick enough' without knowing the size, design, and mounting/support method of your wedge. I can say the .071" 2024 is very sturdy material and would be thicker than most ant wedges I see.
Bending 2024 is a little tricky. Trying to bend too sharp an angle will cause it to crack. To retain maximum strength, a .071" thickness should be bent around a .25" radius forming tool. Do not heat the material to aid in bending: you will loose that T3 temper.
Q: The wedge we be at a 35 degree (more or less) angle and it will drag the floor. It will be roughly .85 inch tall at the tallest point, making it about 1.3 inches along the bottom. I might support the inside of it with balsa wood, but do I need a brace?
A: I don't have enough information to answer the question. I'd need to know specifics on the mounting method, the number and type of fasteners used, and the depth onto the chassis to which you will fasten. Even then it would be a guess since I don't know the capability of the competition you'll be going against. If I say 'no' and some uber-spinner tears the wedge in half, you'll think I gave you bad advice.
It sounds like your wedge will be pretty sturdy. Balsa wood isn't going to help, unless you plan to fill the entire void between the wedge and the chassis. Build your wedge and test it. Go run it into walls at full speed. If it shows any signs of distortion, reinforce it. Very few robots are 'right' the first time they compete. Be prepared to make changes.
Q: Can 0.05" 7075-T6 Aluminum be bend at a 90 degree angle with a vice and a rubber mallet?
A: Sure. Do your bending in as few blows as possible - alloy aluminum can 'work harden' and become brittle at the bend if you work it too much.
Q: Is 15-3 titanium TIG weldable?
A: Mark J. here: yes, although MIG is preferred for thicknesses greater than 0.125".
Q: Regarding antweight batteries and servos (servos for a lifter), is it better to buy cheap Chinese ones since they are gonna get destroyed anyway? Because they are so cheap, couldn't you get a bunch of them for the price of one higher quality one? Is there a big difference between a Chinese battery or servo and a trusted brand servo or battery?
A: Your theory is fine -- if you could call 'time out' in the middle of a match to replace the crummy component that just failed on your robot. As noted in #16:
'Cheap' and 'Combat Robot' don't go together!
Think of it this way: you spend your time, effort, and considerable money to design and build your robot. You spend more of the same to travel to a tournament and compete. One shoddy piece of equipment fails and your opponent trashes your entire robot and sends you home. You'll wish then that you spent the extra money instead of buying some crap from EBay.
With experience you will learn where you can cut expenses and where you can't. If in doubt, think about that long ride home with a failed robot and buy some decent parts.
Q: Is there any way I can access the Composite Lab website or their products now that they are gone?
A: The Internet Archive can give you access to an archived copy of their old website, but the company has been out of business for a couple of years. The only slim hope to find any of their products would be to ask at the RFL forum if anyone happens to have what you're looking for in their parts bin.
Q: How could 'Mechavore' survive the vicious blows of 'Son Of Whyachi'? It only has aluminum armour!
A: There's aluminum and then there's ALUMINUM. An aircraft alloy like 7075-T6 can come close to some titanium alloys in strength, and its lower density lets you go about 50% thicker without a weight penalty. I suspect that MechaVore had well designed, thick, aircraft alloy armor.
Q: I don't have a lot of cash. Can I use brass for my beetle's armor?
A: There are a lot of inexpensive materials I'd suggest before brass. Brass is more expensive than steel, heavier, and not as hard or strong. Go to a dollar store and buy a toughened steel kitchen cleaver for a front wedge that will put up with enormous abuse. While you're there, buy a small UHMW polyethylene cutting board to make awesome side armor. A resourceful builder beats a rich one any day.
Q: Would 1/4 inch UHMW make a good wedge for a 12 pound hobbyweight pusher? Thanks.
A: Mark J. here: as noted in our Armor Guide, the adequacy of a structural piece depends as much on the size, shape, angle, and support that piece has as it does on the material and thickness. I can't get specific knowing only what you have told me.
A few general comments:
I often suggest that builders look at comparable successful robots for design parameters. I don't think you'll find many UHMW polyethylene front wedges.
UHMW is a soft and flexible material, not well suited to form a sharp angle on the front of a wedge. This area would suffer damage quite quickly.
UHMW has very low density; the stuff will actually float. A pound of UHMW, properly used, can provide greater energy absorption than a pound of steel -- but the UHMW would be eight times as thick! A 1/4" UHMW wedge is likely far too thin for a hobbyweight.
UHMW makes great impact absorbing armor panels and structural supports, but I wouldn't consider it for a wedge.
Q: What would you think of Lego pieces for armour. Not that I'd just snap them in, I'd hot glue them together or something.
A: Legos are made of acrylonitrile butadiene styrene (ABS) plastic -- reasonably tough and resilient but not equal to the strength of more commonly used plastic armor. Legos can be welded together with solvent-based glue made for polystyrene model kits, but the exposed walls are not very thick and assembled mass is not going to be nearly as strong as a single sheet of polycarbonate or UHMW polyethylene plastic.
If you're just building robots for fun, it sounds like a fine idea. If you enter a competition there'll just be a cloud of Legos where your robot used to be.
Q: Aaron, sorry to bug you with this again, but I'm on a small budget. Would the Lego armour be sufficient for an antweight? Aren't the ant weapons less damaging? Thanks!
A: I really don't see Lego armor working. I don't know about the ants where you will be competing, but high-power spinners are common ant weapons pretty much everywhere. Don't count on low-damage weaponry.
Take a trip thru your local dollar store. You can find kitchen storage containers made out of polypropylene ('PP' in the recycling symbol) that are tough and flexible, and you might find a thin polyethylene cutting board that would be perfect ant armor.
Q: It's been a while, but I am the Lego armor guy. The Inertia Labs Antweight kit comes with an ABS plastic lid, so still confused.
A: Mark J. here: a convertible automobile has a cloth top. Does that mean it's a good idea to use cloth for a front bumper?
Inertia Labs used to offer titanium lids for that chassis, but they found that the top of an antweight takes very little abuse. A sheet of ABS is adequate for top armor only because it is unlikely to be exposed to a high energy weapon. That sheet of ABS is better (and lighter) armor than a bunch of thin-walled ABS Lego blocks glued together.
If you're intent on using Legos, go for it. However, the current Robot Fighting League Judging Guidelines count every visible scratch or gouge as points for your opponent. You can expect to pay dearly if you go cheap on your armor.
Q: There are many robots whose shell is made of titanium alloy, but weapon not. Why?
A: Bulletproof vests are made of Kevlar, but you don't make bullets out of Kevlar to shoot at them. Armor and impact weapons have very different material requirements:
Robot armor must be resilient and tough in order to absorb impact without permanent deformation. Armor also needs a high strength to weight ratio to provide the greatest protection for a limited weight allowance. Titanium alloy meets these requirements well, but is quite expensive.
Robot impact weapons must be hard and unyielding to efficiently translate force into damage. High density is not a drawback as it allows high kinetic energy storage in a compact form. Hardened tool steel alloys fit the bill here and have a much lower cost than titanium.
Q: Dear Aaron, can the 'BattleSwitch' work to drive 2 motors in 2 directions right from your receiver for an antweight? [Anthony]
A: No, Antony. The BattleSwitch is a 'Single Pole Double Throw' (SPDT) switch that can be operated via hobby R/C gear. One BattleSwitch can turn on and off a single motor in a single direction.
To control a single motor 'forward / off / reverse' requires a switch arrangement called an H-bridge, and you would require a total of four switches for two motors. The RCE220 RC Dual Relay Switch can be used as a single H-bridge, but a pair of small H-bridges are more expensive, heavier, and less useful than an Electronic Speed Controller.
Q: Hey guys, Dave B. again. I've purchased a sheet of .041" 6AL-4V titanium to reinforce the armor on my Inertia Labs kit-based antweights. One will be a pusher/rammer, and the second will end up having some type of active weapon (possibly a drum) once I have some more build and combat experience.
From a practicality standpoint, is .041" too wimpy for primary 'bot armor? I had in mind hinged side skirts when I purchased it, but it's a pretty big sheet, and y'know... the stuff's expensive. I'd like to get maximum use from it. What kind of damage can I reasonably expect it to take in the antweight class? Which applications would you use it in? Generally speaking, do you prefer titanium, polycarbonate, or another material in your ant class 'bots?
Secondly, I have no experience machining titanium. I have worked with mild steel and aluminum, and have plenty of tools in my shop to handle those. Can you advise me on any special saw blades or drill bits I'll need to work the material? I really appreciate all the help.
A: Mark J. here: second issue first - you won't need any special tools to drill or cut thin sheets of titanium alloy. Make sure your bits and blades are very sharp, reduce the drill or saw speed by about half, maintain firm tool to material pressure, and use an appropriate cutting fluid (WD-40 should be fine for your purposes).
The strength of an armor panel depends on size, shape, and the support given to it as much as on thickness, but in general your 0.041" 6AL-4V should be quite adequate for most antweight armor applications. I would consider a double-ply for a front spinner-killer scoop or ram.
The offensive capability of antweights varies a great deal. Take a look at ants active in your area and plan accordingly. Like Team JuggerBot says, "damage is weakness leaving the robot." Make everything strong; if it breaks make it stronger.
Team Run Amok prefers UHMW polyethylene for insect class side/rear armor and polycarbonate for the top. Front impact zones are heat-treated steel -- the weight saved by titanium would be small. We usually have a section of wood somewhere out of respect for our first combat 'bot.
Q: What is the difference between 7075 T6 and 7075 T651 Aluminum, if any? I have a source of cheap 7075 T651 and would like to try it out if it's just as good as 7075. Thanks.
A: Mark J. here: the physical properties of T6 and T651 are the same -- the '51' suffix indicates only that the material has been stress-revieved by a stretching process. Go for it.
Q: Professional boxers goop themselves up with Vaseline or oil to keep an opponent's punches from "sticking." Do you think the same concept might be useful for a combat 'bot? It would add virtually no weight, and while it wouldn't do much for pierces and slashes, it might be of some use against blunt weapons. If someone was very careful to not apply too much and to properly clean up afterward, is it worth a try? Will petroleum jelly or oils weaken certain plastics?
A: Mark J. here: I knew somebody else would figure this out eventually. The coefficient of friction between common armor materials and common weapon material is already pretty low, but there are other advantages to slicking-up your armor. I've used 'Armor All' protectant on plastic armor for years -- it makes the armor very slick and can cause traction problems for robots that try to climb over your 'bot by transferring onto their tires. Use it in moderation, and don't blame me when your robot slips out of your hands and lands on your foot.
Q: Hey Aaron check out this cool stuff. Looks great for some bot building things. What do you think? Even if it isn't it looks really cool. [Website address deleted]
A: I don't provide advertising for products I haven't tested or at least know something about.
Q: After seeing the Mythbusters on pykrete, would pykrete be a good "throwaway armor" for a middleweight?
A: Pykrete has properties similar to concrete; do you see anyone using concrete for robot armor? High on the list of properties required for good robot armor is 'fracture toughness'. Materials that can flex rather than break have high fracture toughness. Pykrete has much higher toughness than ice, but much lower than common armor materials. Think about how much better Lexan would have performed in the same tests that Pykrete was put thru by the Mythbusters. A good spinner would turn Pykrete into pulpy slush.
Q: Is silicon carbide, as used by 'Mortis', good for any of the lighter weight classes?
A: British Robot Wars teams were well known for exaggerating the material specifications of their robots. I am unable to verify that Mortis actually used any form of silicon carbide (SiC) armor, although it is possible that they had a thin SiC coating on some more common armor material.
SiC ceramic has been used as a component of military vehicle composite armor, but only for its ability to resist specific weapons not available to robot combatants.
Silicon carbide is extremely hard, rigid, and heat-resistant, but it is also quite brittle. It's fracture toughness is about 1/10th that of steel and it would shatter under direct impact. A sheet of SiC would be very poor robot armor for any weight class.
Date marker: April 2009
Q: I have some ideas for a new system of heavyweight armor, but I don't have enough money or experience to build the actual robot, any ideas on how I could test the armor?
A: Mark J. here: without knowing anything about your proposed armor system I can't make much of a suggestion on testing. Simulating a high-speed multi-thousand Joule weapon impact isn't easy. The best test would be to build a full-scale test panel, attach it to a dummy weight, and let a competitive heavyweight spinner take a shot at it.
Incidentally, I can pretty much guarantee that whatever material(s) and mounting technique you're thinking about has already been tried.
Q: My dad has experience in making custom composite parts from resin and carbon fiber cloth. Do you think that this could be a good way to make armor, because you can make it so that the stresses aren't on just one small side piece? Has anyone done this before?
A: Carbon fiber composite armor is common on small robots. It is lightweight, stiff, and highly impact resistant. Robot Marketplace stocks CFC sheets, rods, and angles.
Use of CFC on larger robots has been limited by the expense of large and thick sections of CFC and because CFC shatters when it fails. Judges give your opponent a good score for putting a big dent in your armor, but they give a huge score for ripping chunks of your armor off and tossing them around the arena.
Also, please note section 12.6 of the Robot Fighting League rules:
"Hazardous or dangerous materials are forbidden from use anywhere on a robot where they may contact humans, or by way of the robot being damaged (within reason) contact humans."
Carbon fiber dust as generated when abrasively cutting CFC is dangerous to humans. A specific event organizer may choose to disallow CFC armor if they feel it might present a hazard.
Q: I talked to my dad, and he said that I should consider making the armor out of Kevlar, with a small bit of carbon fiber on the inside. Good idea?
A: Kevlar is a good choice for armor. It is more flexible than CF and does not shatter, even when the resin fails. However, armor made of layers of materials with differing properties can be very tricky. In this case, the Kevlar will flex and transfer most of the impact force to the stiff thin carbon fiber layer which will shatter. I think I'd stick with straight Kevlar. The most effective armor materials are those that can flex to absorb heavy impact.
Q: I'm searching for a 12vdc actuated clutch, 0.86" diameter max and max length of 2.5" to support 1 Nm of torque. Any suggestions? Thanks
A: You've backed yourself into some pretty specific design and performance criteria. I don't have any sources for such clutches. My only suggestion is that you avoid such narrow constraints in your design next time.
Q: I'm thinking of building a beetleweight with a vertical spinner. What type of metal do you think I should use for the structure?
A: Hard to comment since I have no idea what type of structure you plan to build, what your budget is, or what tools and skill level you have. In general, aircraft aluminum alloys like 6061 are popular for structural elements.
Q: Several times in your archive you state that you feel that polypropylene is inferior bot armour. Could you elaborate?
A: Mark J. here: I believe I say that only once. I consider it to be inferior to other plastics like polycarbonate or UMHW polyethylene and I have numbers to back that up. Take a look at the table below: the mechanical properties of polypropylene are far below those for polycarbonate. Both polycarbonate and UHMW polyethylene have much greater ability to absorb impact without failing, as shown in the 'Tensile Elongation' and 'Izod Impact' tests that reflect the 'toughness' of the material.
Polyprop
Polycarb
UHMW-PE
Density (lb/in³)
0.033
0.043
0.034
Tensile Strength (psi)
4,800
9,500
3,100
Tensile Modulus(psi)
195,000
320,000
125,000
Tensile Elongation (%)
23
60
No Break
Flex Modulus (psi)
160,000
375,000
125,000
Compressive Strength (psi)
6,000
12,000
2,000
IZOD Impact (ft-lb/in)
7.5
13
No Break
In thin sections for an insect class robot polypropylene can be put to good use. I've used it myself for my antweight 'Rat Amok' because I happened to have a polypropylene box just the right size for my purpose. If I had a polycarbonate box that same size, I would have used it instead.
Q: Can 4130 and 4140 steel be heat treated in the same batch?
A: Mark J. here: there are a lot of different 'heat treatments' that can be applied to alloy steel: annealing, normalizing, spheroidizing, tempering, and hardening -- to name a few. I'll assume that you are interested in hardening and tempering.
Both alloys are oil-quench hardened, but although the temperature requirements for heat hardening and tempering 4130 and 4140 alloys are similar they are not overlapping. I would not suggest treating the two alloys in a single batch. Discuss your specific needs with your heat treater.
Metal Suppliers Online is an excellent source of information on metal properties and treatment requirements.
Q: Where can you get McMaster Carr catologs?
A: Industrial supplier McMaster Carr sends out their 3700+ page printed catalogs only to customers who purchase a large volume of products. Their on-line catalog is entirely complete and possibly more useful for most searches than their paper catalog. If you really want a printed catalog, there are often current versions (#114 is the most recent version as of December, 2008) available on EBay.
Q: What can you tell me about the Inertia Labs micro pneumatics components?
A: In 2003, Inertia Labs manufactured a line of miniature pnumatics components (archived webpage). These components could be used to make a flipper weapon small enough for an antweight robot. Supplies of these components have run out.
Inertia Labs used these components to build an antweight flipper named 'Pele' that fought from 2003 to 2005 and attained a 10 win, 14 loss record.
The Inertia Labs micro pneumatics system works just like a larger pneumatic system, just on a smaller scale. It's a low pressure system using compressed air at 145 PSI. Answers to specific questions about the micro system can be found at the Micro Pneumatics FAQ.
Q: What is good material for antweight lifting arms? How thick should they be? Would 7075 T6 alluminum be good?
A: Mark J. here: many factors interact when designing a robot component. The suitability of a small lifting arm depends on much more than the material used. Other factors include the unsupported length of the arm, the cross-sectional shape of the arm (flat, I-beam, U-channel, tubular...), and the protection the arm has from weapon impacts. I could build a perfectly acceptable lifting arm out of a fast food plastic fork if I was careful with the other factors.
I couldn't give you help on what material you need or how thick the material needs to be without full details about your robot design, but please don't send those details -- I'm not running an engineering service. Look around at other robot designs similar to your own for a starting point. A strong aluminum alloy like 7075 is a perfectly good general robot constructiion material. Build your lifting arm, improve it if it fails, and learn from the process.
Q: Where can I buy a bearing block for a 6mm shaft with a 14mm center height?
A: It's really common to get your whole robot design laid out only to discover that you need some very specific part that's difficult or impossible to find. If you have machining skills and a proper shop you can often make the required piece. If not, you either change the design or learn to 'bodge'. You'll probably do best to get a short 6mm pillow block and put a spacer under it to bring it up to the correct height.
Q: can u glue lexan with a glue stick and duct tape? it is for an ant chasie.
A: Mark J. here: you might as well use spit and a piece of string. For best strength, Lexan must be bonded with a solvent cement designed for plastics. A solvent cement chemically welds the joined surfaces together into a single piece as strong as the surrounding material. Your local hobby shop may have a suitable cement, but don't let them sell you cyanoacrylate (super glue) or epoxy for this purpose. Here's an eHow article on bonding Lexan
Q: Is 1/2" premium UHMW strong enough for a beetle? Is 0.05" 6 Al-4V grade 5 titainium strong enough for the wedge and back piece? The wedge and back are 9" long. Thanks.
A: We've said this often: structural performance depends on factors other than just material and thickness. The size and shape of the piece, mounting method, and support from other chassis elements all count toward performance. Just being given the material and length of a piece is too little information. You're not even telling me what you want to make out of the UHMW!
A: I wrote to Dan Danknick and asked about the additional suports shown in some of the images:
"You're right, a couple of the images are CAD models including the [RCM505] retainer. [The RCM505 retainer is] no longer available and though I've adjusted the kit contents list and price to reflect that, I forgot to change the images."
So, no -- the long bolts and end plate supporting the motor in some of the images is not included in the current kit and is no longer available.
Q: How does '02' tool steel sound for the bottom plate of a superheavyweight?
A: Mark J. here: the various tool steels are not generally suitable for armor. A tool steel is designed to be harder than other steels, but hardness should not be confused with strength. In order to obtain high hardness, other properties are sacrificed. Tool steels tend to be britile -- not a characteristic you want in armor. You are also going to have dificulty finding a plate of tool steel large enough for the bottom plate of a superheavy.
A tool steel bottom plate would be highly resistant to damage from a 'killsaw' style arena hazard. If you really did want to use a tool steel for this purpose, 02 would be a good choice.
Q: How come not that many robot builders use tungsten?
A: I don't know of any builders that use metallic tungsten. Tungsten does have high tensile strength, but there are many other properties to consider in material selection. Tungsten is brittle -- it does not hold up well to impact. It also weighs two and a half times as much as steel, which makes it much too heavy for structural members in a combat robot.
Q: I'm thinking of using Nylon 6 as a chassis / armour material in a thwackbot featherweight. Do you have any advice on using it, or should I go for something like UHMW polythene or polypropylene instead?
A: Mark J. here: Nylon 6 has high tensile and flexural strength, but it performs poorly under heavy impact: it breaks. Polypropylene is a little better, but still far inferior to the more commonly used plastic or composite armors. Try polycarbonate, UHMW polyethylene, or Garolyte instead.
Q: Dear Aaron, I was wondering if the following metals would work for a simple antweight wedge for my Inertia Labs kit:
0.05" 2024-T3 Aluminum
0.04" 2024-T6 Aluminum
A: Mark J. here: the 2024 and 7075 'aircraft' aluminum alloys are good choices for armor or wedges. Both alloys are strong, hard, and fatigue resistant. The difference between the T3 and T6 tempers will not be noticeable for your purpose. A good summary of aluminum alloy properties can be found at OnlineMetals.com.
You're in the right ballpark on thickness, but just how thick will depend on how well the wedge is supported by the mount and the overall size of the wedge. When in doubt, go thicker.
Q: How about 0.05" 7075-T6 Aluminum for a 4 centimeter long 10 centimeter wide wedge supported by 8 screws on the top of the robot? (the wedge being bent down and dragging against the floor). Thanks, you're a great help.
A: Hmmmm... that's not what I would consider to be good mounting support. The force applied to the wedge is going to be at a point farthest away from the mount, and the aluminum has already been bent at an angle below the mounting point. You're going to bend the wedge further downward with a good hit. Good engineering practice calls for more support closer to the point where the force will be applied. A full-width brace between the chassis and the wedge would greatly strengthen structure. With that brace, your .05" 7075 wedge should be great.
Q: Do you think that side skirts 2.5 centimeters long and 13 centimeters wide, made out of 0.05" 7075 T6 Aluminum and supported at the top would need extra support near the bottom? Is it a good idea to hinge side skirts or not? Would that tape that you use for your skirts be strong enough for antweight side skirts with the same dimensions as above?
A: Hinged side skirts aren't going to get the same type of stress that might be applied to the fixed front wedge, so no extra support should be needed there. Side skirts should be hinged -- you want them to drop down and ride along the arena floor with zero clearance. We use 3M #396 Super Bond Film Tape for our insect-class skirt hinges. It would be plenty strong enough for your purpose, but it is difficult to find. Aircraft control surface tape (also called hinge tape) from your local hobby shop is very similar.
Q: Where can I buy magnets that would be effective in holding a beetleweight to a steel arena floor, not to be used as wheels, but just to be placed in the chassis and give the wheels a bit more grip?
A: A web search for 'surplus neodymium magnets' will turn up a large number of sources for very strong rare-earth magnets. I've had good luck with K&J Magnetics. Why not go with wheel magnets?
Q: Where can you buy full pressure CO2 actuator cylinders? Is it legal in RFl rules to build your own, as shown in the Invertabot construction log?
A: Mark J. here: CAUTION -- full-pressure CO2 systems are dangerous and definitely not recommended for builders without extensive experience.
For those builders with pneumatic system experience, the usual choice for a high-pressure actuator is a hydraulic cylinder. Hydraulic components are typically rated 1500 to 2500 PSI, well above the maximum pressure available from unregulated CO2. Hydraulic cylinders are available from industrial suppliers, such as McMaster-Carr.
I would generally discourage anyone from attempting to construct their own high-pressure pneumatic components.The RFL rules call for high-pressure pneumatic components to be rated and/or certified for use at the maximum system operating pressure plus 20%. I don't believe you'd have much success convincing an event organizer that your homebrew parts have an industrial certification.
Q: I've heard that paintball CO2 regulators from Palmer-Pursuit work in combat robots, but which one should I choose? I also need a suggestion for a solenoid valve -- it doesn't need to be anything wonderful since I'm using a buffer tank.
A: Mark J. here: Suppose you were working in a pizza parlor and a customer came in and asked, "Which pizza do I need to feed my family?" They haven't given you enough information to answer their question. How many people are in the familly? How old / large / hungry are each of them? How do they feel about anchovy?
Same thing here. I don't know what weightclass your robot is in, the size of the actuator, the geometry of your weapon linkage, the flow rating for the other components in the system, or your expectations on performance. I cannot answer your question.
Note: a buffer tank will not make up for a poor-flowing actuator valve. A buffer tank allows the accumulation of a volume of gas at full actuation pressure between the pressure regulator and the actuator valve. This allows use of a regulator that may not have the flow capacity to keep up with your actuator clyinder, but the critical importance of the actuator valve in flowing enough gas fast enough to the actuator is unchanged. A pneumatic system will perform no better than the poorest performing component in the system.
Q: The wire section at Robot Marketplace they doesn't specify the insulation material used on most of the wire. Any idea what it is?
A: Some of their wire choices specifically say they have silicone insulation. If it doesn't say, it's a good bet that the insulation is standard PVC.
Q: I can't find an 'A size' v-belt the length I need (14"-15") from McMaster-Carr or the Robot Marketplace. Can I cut a longer one and solder it back together?
A: Mark J. here: no!
V-belts have internal cords that prevent stretching and provide structural strength. Cutting a belt and heat welding it back together would give you a belt that would fail immediately under load.
The smallest conventional A-size belt I can find is 16" at www.mainsupplies.com, but it wouldn't hurt to check your local auto parts store or lawnmower repair shop.
Your best bet may be a resizable PowerTwist belt. These are made up of individual linked sections and can be assembled by hand to any reasonable size. I have never used them, but they are reported to be as strong as conventional belts.
Q: Where can I buy large sheets of S7 Tool Steel? The widest sheets McMaster-Carr has are only 4 inches.
A: Mark J. here: I've never seen S7 flat stock wider than 6". onlinemetals.com has 6" widths up to 1/2" thick. Both suppliers offer other grades of tool steels in widths to 12" and thicknesses to 4".
Q: In a previous question regarding a spinner-killer's scoop, Mark J. said that S7 tool steel comes hardened. In another question about ramming spikes, he said that it doesn't. Which is true?
A: Raw tool steel stock from a metal dealer is shipped in a relatively soft annealed form so that it may be machined, shaped, and formed. It will require hardening before use. If purchased in a finished tool form, the steel is hardened. If in doubt, ask your supplier.
If you buy from a metal dealer you'll know what you're getting, but I have access to an exotic scrap metal yard where the material may be either annealed or hardened. Sorry if you found my comments regarding the spinner-killer scoop misleading -- I've edited that answer.
Q: Which other grades of tool steel would you recommend for a featherweight spinner with a 8in disk?
A: I wouldn't recommend making your whole disk out of tool steel. Take a look at disk weapons from other builders; they tend to be aluminum or titanium with hardened steel teeth. You use tool steel for impact surfaces where hardness counts in delivering damage, not for the main body of the weapon where toughness is much more important. Also, a piece of tool steel that large may warp significantly when hardened.
If you decide to ignore my advice, go with an oil quenched tool steel like 'O1' that forms a relatively thin hard surface and still retains interior toughness, or a warp-resistant air quenched alloy like 'A2'.
Q: What do you think would be the best way to mount a Colson wheel to a 42mm Banebots motor? Could I drill out the bore of the Banebots hub larger and rebroach the keyway?
A: The press-fit BaneBots hub for 3" to 5" Colson wheels is only 0.59" in diameter. If you drill out the bore to 0.50" there won't be enough material left for a keyway.
The best solution is to order your Colson wheels fitted with with custom hubs from Team Delta. They will modify the wheel and mount a bolt-on hub that will fit perfectly and give no trouble.
Q: Hm... Are there any Colson Hub solutions adaptable to either the 36mm or 42mm Banebots motors for the 2" wheels? Could I Loctite in the keyway included from either the Robot Marketplace or Banebots and broach a keyway?
A: The Colson wheels are easy to modify. The 13mm bore of the 2" wheel can be enlarged to accept the 15mm BaneBots hub for the 36mm gearmotor. Alternately, you can broach a keyway into the wheel and mate it directly to the 1/2" shaft of the 42mm gearmotor.
Don't bodge the hub with Loctite, tape, or glue. Hold the wheel in place with proper mechanical methods: the banebots gearbox shaft is tapped on the end for a bolt/washer combo, and the inner limit can be set with a locking collar or spacer. I've seen more robots break down from bodged hubs than any other single cause. Do the hubs right or you'll wish you had.
A: The Du-Bro wheels are made for R/C airplanes -- your local hobby shop probably stocks these. The wheels are not solid aluminum chunks, so the 1/8" axle hole can only be drilled out a little. They are entirely not suitable for a featherweight combat robot.
Q: What bearings should I use to mount my beetle's spinning weapon?
A: Mark J. here: you haven't given me enough information about your weapon for me to make a specific recommendation. In general, ABEC grade 3 steel ball bearings are adequate. Higher grades are are more expensive and are made to higher precision, but precision isn't critical in this application. A 'shielded' bearing design will help keep grit and debris out of the bearing.
Date marker: March 2008
Q: Can I use Aluminum for a bot frame?
A: Aluminum is a popular material for bot frames, but you need to know that there are various grades of aluminum: 6061-T6, 2024-T3, and 7075-T6 are strong and durable alloys well suited to bot construction. Other alloys may be very soft and relatively weak. Browse thru this archive for information on different aluminum alloys.
Q: Can I use Laminite for bot armor?
A: Yes -- but Laminite is very heavy and somewhat brittle in thin sheets. There are better armor materials.
A: An abrasive cutting disk works very well. Wear eye protection and a dust mask. A fine-toothed hacksaw will also do an acceptable job. Square up the cuts with a sanding block.
Q: I just went to a bunch of thrift stores and I bought a bunch of metal plates and pans and things like that. i just thought this was a cheap way of getting ant armor for a first time 'bot builder. Might want to post this idea. Thanks a ton for all the help you have given me!
A: Yes, I've seen many antweights with recycled kitchen components for armor. I'm always thinking about robot applications when I wander thru a dollar store or thriftshop.
Q: Is there any way to increase the traction on standard Colson wheels?
A: This is the first complaint I've ever heard about traction with Colson wheels. The rubber is pretty grippy on smooth, clean surfaces. Clean the tires with rubbing alcohol between matches and let dry. Move heavy components around on your chassis to concentrate weight on the drive axle. If you're still getting excessive wheelspin it's just because you have more torque than weight.
Q: What exactly is a linear actuator? What can they be used for in combat robots?
A: In combat robotics a linear actuator is a device which converts the rotational motion of an electric motor into the extension/retraction of a rod to provide a pushing and/or pulling force. Their speed is not nearly as great as pneumatic actuators with the same force, but they require only electric power and simple controls to operate.
Typical uses in combat robotics include lifter weapons (BioHazard), clamping jaws (Jawbreaker), and self-righting mechanisms.
Q: What linear actuator would be best for a Lightweight clamper? How much power would it need, and what speed controller should be used?
A: Mark J. here: I'm not sure that I can recommend any electric linear actuator for a lightweight clamper. There are dozens of manufacturers offering hundreds of models, but it's still unlikely that you'll find an off-the-shelf unit that will meet your needs. Tell me about your design and I'll see if I can match an actuator to it, but effective combat clampers larger than insect class use custom actuators or pneumatic power.
A linear actuator is typically controlled by an R/C Dual Ended Switch, not a speed controller.
Q: I want to add some steel spikes to the front of my lightweight ramming 'bot to help absorb impact and deal some damage. What should I make them out of, and how?
A: Mark J. here: I'll take the metallurgy question. The alloy of choice for impact weapons is 'S7 tool steel' for a good balance of hardness and impact resistance. The best material source I have is McMaster Carr: search for 'S7 tool steel'. The 'unpolished mill finish' rods are fine for your application and are much less expensive than other options.
Tool steel is supplied in an annealed form -- soft enough to be machined to a point or chisel profile. After you have cut and shaped the spikes the steel must be heat treated to produce the hardness needed to penetrate armor. Check your local phone book for companies that heat treat metal. Tell them what the spikes are made of and how they will be used.
Too much trouble? Your local tool store has heat-treated chisels and punches that would be a reasonable substitute.
Now you have some spikes that will take enormous punishment and punch thru armor like cardboard. The next problem is that spikes don't 'absorb' impact, they just transfer it back to their mounting points. Make those mounts strong and well braced. The judges won't be impressed if your spikes fall off or your chassis buckles under impact.
Q: Okay then, what would be the best way to mount the spikes? Could they be welded after heat treatment, or could the chisels be welded out of the package?
A: Yes, you can weld heat treated steel, as long as you're careful not to heat up the whole mass and ruin the treatment. Chisels are generally heat treated only on the pointed end, so they retain ductility at the 'hammering' end. I'd rather make a mount for the spikes from which they could be removed and replaced quickly if needed. Maybe a steel tube welded to the chassis that the spike could slide into? Run abolt thru both the tube and spike to hold it in place. Drill the hole in the spike before you heat treat it, and weld a plug at the back end of the tube to take the force -- the bolt only holds the spike 'in'.
Q: Can I use the two battery packs that came with my Harbor Freight drills to power my 'bot?
A: Mark J. here: the HF NiCad battery packs are not 'combat quality': they are heavy and bulky for their capacity. You can use them if you're on a really tight budget, but don't try to use the battery chargers that came with the drills. They are far too slow.
Each pack has a capacity of about 1.2 amp-hours, so a single pack should be plenty to run two HF drill motors in a light 'bot for a 3 to 5 minute match. Check the
Team Tentacle Torque & Amp-Hour Calculator for an estimate of the battery capacity your 'bot will need.
Q: Where can I get a low-voltage shut-down circuit for my Li-poly battery? I need it to be shut down when voltage drops below the recommended minimum cell voltage. I saw one at Baldwin Controls, but I want to have some more options.
A: Really bad idea! You're gonna be in combat and suddenly have your 'bot shut down to prevent possible battery damage? How about the damage your opponent is gonna do to you while you're sitting there immobile?
No fuses! No circuit breakers! No auto shut-down in combat!
Best solution is to make sure your battery pack has enough capacity to last the entire match. If you're still concerned, there are devices available that flash a light and/or beep loudly when the Li-poly pack voltage drops too low (example). That gives YOU the option of shutting down.
Q: I'm making my own 4 inch wheels for my hobbyweight with a hole saw out of 3/4 inch Lexan for the main body of the wheel. What should I use around the Lexan for grip, and where can I buy it?
A: Mark J. here: it's very ambitious of you to build your own wheels. Any particular reason you don't want to use the wheels everybody else is having success with?
Getting a high-grip material to bond to the plastic wheels you're making isn't going to be easy. Industrial plastic wheels have their tires bonded in place in high-pressure molds that aren't practical for a small-scale builder to duplicate. Some sumo robot builders mold a multi-part urethane resin around their wheels for their special high-traction needs -- but this requires a custom mold and their wheels don't have to stand up to spinner attacks. I've also seen sumo builders glue a wide rubber band around the outside of a plastic wheel with contact adhesive.
You could try a layer of RTV silicone sealant applied to the outside of your wheel. You can get silicone sealant at any hardware store. It isn't going to stick very well to the Lexan, and getting it on in an even layer without a mold is going to be tricky.
A reasonable solution might be to machine a groove around the outside edge of the wheel and glue a rubber O-ring into the groove. Industrial suppliers like McMaster-Carr can supply O-rings in a wide range of sizes and specific materials.
My suggestion: don't make it hard on yourself. There are lots of reasons Colson wheels are so popular. Use them and you won't regret it.
Q: I need to make the inner diameter of a Lexan tube larger. Is there some kind of simple tool that will do the job?
A: Mark J. here: I wish you'd mentioned how big and long the tube is, how much material you need to remove, and how precise you need to be! If the tube is big enough, you can use a 'flap sander'. It's a bunch of abrasive flaps attached to a shaft that fits in your drill. With a shaft extender, you can work down a pretty long tube with one. They come in several sizes - check your local hardware store.
For a smaller tube, you could use sandpaper glued around a wood dowel a little smaller than the inside of the tube and work it by hand.
If the resulting tube has to be very precise, a machine shop could put it on a lathe and bore or shave the inside diameter. Best luck!
Q: What is the weight of a 20:1 Radicon gearbox?
A: Mark J. here: Radicon makes a variety of industrial gearboxes with different designs and capacities. I don't know which one you want, plus I don't have their catalog. Industrial gearboxes are made for durability, not light weight. A typical industrial 20:1 worm gearbox with a 200 inch-pounds output capacity weighs about 10 pounds.
Q: I have a few questions about garolite:
There are so many different kinds, which one should I choose for a 30lber baseplate?
How thick should it be? The only motors are 4 Small Johnsons at 14.4V with T-Boxes, to give you an idea of the torque.
How dense is the garolite that I should use from Mcmaster Carr?
Thickness will depend on the dimensions of the baseplate, the distance between load points, the location and number of stiffening elements, and many other design factors. The Totalinsanity chassis design tutorial (archived) may provide you with some help. Note that I've never seen a garolite chassis for a 'bot bigger than a beetleweight.
Garolite weighs about 1.1 ounce per cubic inch.
Q: My bots footprint is 12x12 inches. The garolite would have to cover the bottom, so a 12x12 piece with it being screwed into .25 titanium at each edge. So the maximum span would be 11.5. The motors would be as far as possible to the corners to get maximum benifit from wheels on the outside. From center of front left motor to center of front right motor is 6.128", and center from front right motor to back right motor is 6.044. Could .125" garolite work for this setup? I've heard that it is less bendy than an equal thickness of aluminum, and people do use garolite in 30's, maybe more but 30's are the largest I've seen. Thanks.
A: My best advice is to ask a builder of one of those featherweights you know about how thick their plates are. As an educated guess, I think you could get away with 1/8" garolite -- if you have it supported on all edges and can add a stiffening vertical center support up to the top cover. Going to 3/16" would add about 9 ounces to the weight. I'd go for that.
Like carbon fiber, when garolite fails it fails big. Aluminum dents, garolite comes all apart. Use metal washers to spread the load at equipment mounting points, and have a spare baseplate in the pits.
Q: I don't have access to many powertools at the moment. Can polycarbonate be cut with a woodsaw or hacksaw? Will polycarbonate crack if I attempt to drill holes in it with a normal electric drill?
A: Polycarbonate cuts, drills, and machines very much like other soft plastics. It is a good armor material only because it can absorb a large impact by deforming. A normal sharp drill bit bores through it just fine, a fine-toothed hacksaw cuts it easilly, and sandpaper will smooth the edges.
Q: How do I bend carbon fiber composite? What is the thickest carbon fiber that can still be bent to shape? What machine do you use to bend it?
A: Carbon fiber should not be bent - it seriously weakens or breaks. Angled or curved carbon fiber was formed to shape when made, not bent afterward. The whole point of CF is how stiff it is.
Q: Where can I buy the parts formerly available in the Robot Marketplace's Micro Pneumatics kit?
A: The antweight-sized micro pneumatic parts were made by Inertia Labs, but they are no longer listed at either thier site or at the Robot Marketplace. There is contact info at the Inertia Labs site -- you could drop them a note and see if they still have a few pieces around, but it looks like they no longer make them. Try a 'parts wanted' post to the RFL Forum to see if anyone has spares in their parts bin.
Q: I'm building a hobbyweight and I'm very tight on weight. How would 2.5" Lite Flite wheels compare to 2.5" Colsons for a 12-pounder? Any other insect weight wheels that might work better?
A: Mark J. here:
Advantages:
The Lite Flites would certainly save weight. A 2.5" Lite Flite wheel / tire weighs less than half an ounce, versus 2.25 ounces for a Colson.
Disadvantages:
The wheel is molded snap-together hollow plastic that's very flimsy compared to the Colsons.
Matching the 5/32" wheel center bore to the 3/8" shaft on your gearbox will require machining for the hubs.
The foam rubber tires don't give as much grip as the Colson rubber.
I'm guessing that your hobbyweight doesn't have much in the wheel protection department. I don't see any insect wheel standing up to hobbyweight punishment unprotected. I'd find someplace else to save the weight.
Q: My wheels would extend only a .25" from the top and bottom.
A: The protection sounds great, but there may be another problem. The Lite Flites are pretty 'squishy'. With a few pounds of weight on them, your .25" clearance might squish down to almost nothing. You can always go to the 2.75" size if you need to. Keep a few spares in your toolkit in case things get rough.
Q: What about HPI Geolander R/C wheels? Foam-filled pneuamatic tires, 4"x2.1", only 90 grams each including foam insert, and they appear to have good traction qualities for $17 a pair.
A: Those tires are a fairly common offroad R/C item. You can match them to a variety of R/C wheels. Drawback: 90 grams for the tire plus 30 grams for the wheel ($12.95 a pair) equals 120 grams -- more than 4 ounces. The 2.5" Colsons you rejected as too heavy only weigh 73 grams, have great traction, and are combat proven. Colsons are popular for a reason -- use them.
Look for a heading hold gyro that has the ability to adjust the sensitivity or 'gain' of the gyro via a spare channel on your radio. If your 'bot gets inverted, the gyro correction signal is reversed - shutting off the gyro will avoid a 'death spin'.
I plan on using 2 IFI victors with the Robot logic IMX-1 mixer, and that mixer has the ability to adjust when inverted. If I use the invert feature on the Robot logic mixer, will that avoid the 'death spin', and what do you mean 'death spin'? Thanks.
A: Mark J. here: when your invertible tank steer 'bot flips over, the forward/backward response to your control inputs is reversed -- a forward command will back the 'bot up and vice-versa. However, the turning response is not reversed -- a left turn command still turns the front of the 'bot to the left because both the direction of the wheel rotation and the side of the robot the wheel is on have reversed and the two reversals cancel each other out.
Unfortunately, an upside-down gyro reads left as right and right as left. When your 'bot drifts a little left, the inverted gyro reads that as drifting right and dials in some left steering. This causes more left drift, to which the gyro responds by dialing in even more left steering. It's a 'positive feedback loop' that sends the 'bot into an uncontrollable 'death spin'.
A mixer with an invert feature will correct the forward/reverse response issue on an inverted robot by reversing the interpretation of the throttle input, but that won't avoid the death spin. The gyro itself must be shut down. Note that this isn't a problem in the aircraft that the gyros were designed to work with because they do reverse directional control when inverted.
I've added an explanation to the gyro article to make it a little clearer.
Q: Should I use 7075, 6061, or 2024 aluminum for my armor? It will have an outer layer of Lexan on it for shock absorption, as well as being bolted to my bot using shockmounts. That should stop those spinners!
A: Mark J. here: Multi-layer armor like you suggest is tricky and often less effective than single-layer armor of the same weight. Lexan is effective at energy absorption only if it is allowed to flex. By backing Lexan with rigid aluminum you will greatly reduce the desirable energy absorbing properties and impact will be transmitted directly to your relatively thin underlayer. You can vary the hardness of armor in layers, but the layer stiffness should remain fairly constant to allow the load to be spread evenly. Search the Ask Aaron archive for 'composite armor' for more comments.
I'm not a big fan of aluminum armor, but T6 tempered 7075 is generally the best aluminum alloy for that purpose. It's harder and has higher shear and yield strength than 2024 or 6061. It's price is comparable to 2024, and about twice that of 6061. Note that both 7075 and 2024 are very difficult to weld.
Q: Another question about the scoop for my middleweight spinner killer. Steel is to heavy, and I just can't afford titanium -- it would be thousands of dollars for the scoop alone. So what about half-inch thick 6061 aluminum?
A: Yes, titanium is expensive -- but thousands of dollars?? Check with Titanium Joe. Aluminum is not a good match against the tool-steel teeth of a serious spinner. With scoring based so heavily on visual damage, you can't afford big gashes in your scoop. I'd rather see you go with a thinner, hardened or tempered steel scoop reinforced across the back as needed.
Q: When they say titanium has an ultimate tensile strength of 150,000, how thick of a piece of titanium is that measured on? Obviously 1/8" thick titanium isn't as strong as 1" thick titanium.
A: Mark J. here: Tensile strength is measured by placing an increasing linear pulling force on a material sample until it breaks. The unit of measure is 'pounds per square inch', and is calculated by dividing the maximum resistance provided by the material sample by the cross-sectional area of the sample in square inches.
Tensile strength is not a very useful measure in evaluating the suitability of a material for most combat robot uses. More interesting for applications such as armor are measures of impact resistance, toughness, elasticity, and hardness.
Q: Hi Aaron: I am building a small robot. I plan to purchase the Sabertooth 2x10rc ESC with built-in mixing for the two drive motors. I know the bot will move forward and reverse in a straight line and turn left and right, but will the 'bot turn left and right in reverse?
Thank you for your answer.
A: All variable-speed dual-channel robot motor controllers on a robot with differential steering will allow you to:
move straight forward and backward;
rotate in place clockwise and counterclockwise;
move forward while turning left or right; and
move backward while turning left or right.
Some dual-channel ESCs (Sabertooth included) have a plug for a third control channel that allows you to reverse the direction of the steering response if the 'bot is flipped. Very handy in an invertible 'bot.
Q: How do I attach 1/8" polycarbonate to 1/8" aluminum for armor?
A: Polycarbonate and aluminum can be bonded with a 'Goop' type adhesive, but mixing materials to make a composite armor is tricky. You're trying to get the best properties of both materials, but it's just as easy to end up with the worst properties of each! I don't recommend it.
Q: Would 1/8" polycarbonate plus 1/8" aluminum be adequate heavyweight armor?
A: Heavens, no! You'll need much thicker armor for a heavyweight. Current design favors at least 3/4" high-strength alloy aluminum or 1/2" titanium for protection from heavyweight spinners. Quarter-inch plastic or aluminum is purely sub-light class.
Q: Titanium is expensive! How thick should polycarbonate armor be for a heavyweight robot?
A: Mark J. here: good armor is less expensive than having your opponent punch thru your poor armor, destroy your 'bot, and blow you out of a tournament. Heavyweight 'bots are expensive. If there was a less expensive alternative to exotic metal armor, builders would be using it. The current field of heavyweight spinner 'bots are brutal!
No matter how thick you make the plastic, polycarbonate is not a direct replacement for titanium. They have different strengths and weaknesses. Take a look at the Team Stupid materials page (archived) for a listing of suggested uses for different materials and alloys.
Q: How do I trim sintered bronze bushings? When I trim them they don't seem to fit right. What tools should I use to trim bushings?
A: I'm not sure what you mean by 'trim'. If you're reducing the outer diameter of the bushing, it should ideally be done on a small lathe. Small adjustments may be made with a jeweler's file. Bushings should be a snug fit -- they should not rotate in their mounting.
Q: What is 'spring steel'?
A: There are a lot of different types of steel. The properties of the metal vary widely according to the elements alloyed into the mixture, the process that is used to form the steel, and various heat-treating processes that may be applied to the metal after it is formed. A 'high carbon' steel that has been specially heat tempered takes on properties that allow it to bend and 'spring back' rather than permanently deform is called 'spring steel'. The process often leaves the surface of the steel darkened with a blue tint. Spring steel is more resilient than structural steel, but it is not as tough -- it will break rather than dent.
Q: I want to glue 1/16 CF on to 3/16 UHMW for armor. What glue should I use?
A: Mark J. here: Let me pose another question first -- Is it a good idea to combine Carbon Fiber and UHMW Polyethylene to make composite armor?
Consider the properties of the two materials: carbon fiber is extremely stiff with a fairly hard surface, while UHMW is soft and so pliable that it is considered 'unbreakable'. If the proposed composite was placed under stress, all the force would be placed on the stiff CF with the UHMW simply bending out of the way with little resistance. Only when the CF fails would the properties of the UHMW become useful. Bad combination!
Back to your original question: if you decide to do this anyway, what glue should you use? Polyethylene is almost as slick as Teflon and very difficult to bond. Epoxy, silicone, and cyanoacrylate adhesives won't work. The surface has to be chemically modified to allow an adhesive the chance to get a grip! 3M makes a couple of two-part adhesives that will do this: Scotch-Weld Structural Plastic Adhesive DP8005 and DP8010. They are difficult to find, expensive, and tricky to work with. You can view the product data sheet for DP8005 here: DP8005.pdf.
If you really want to bond CF to something for effective composite armor, try Garolite and an epoxy adhesive. UHMW, like polycarbonate, needs to flex to absorb energy and be useful as armor. Adding a stiff CF layer doesn't make good sense.
Q: My armor is also the chassis side plates. I need to tap holes into the side plates to mount the top and bottom chassis plates. Garolite (like CF) doesn't hold edge taps well. Can I glue CF to Lexan?
A: Lexan is much easier to glue than UHMW polyethylene, but you'll still have the problem of the Lexan flexing a lot more than the CF. You can use a gel cyanoacrylate 'Super Glue' to bond CF to Lexan, but I think I'd use 'Goop' adhesive or silicone sealant for a little 'give' with a countersunk screw thru the CF into the Lexan in each corner for a little mechanical insurance.
Q: There are so many steel alloys that I don't know which one would fit my purpose! Do you have some good links about steel alloys?
A: Mark J. here: there are a HUGE number of specialized steel alloys, and several different standards for referring to them. There are entire college courses devoted to steel alloys and library shelved filled with books on the topic. Add to this the various heat treatments, casting and milling options available and you're quickly in deep water!
To narrow your search I suggest that you first determine which alloys are available from your supply sources and research their properties. It won't do you much good to find an alloy you want that you simply cannot get in the shapes or quantities you need!
Physical and mechanical properties of specific metal alloys and plastics:
MatWeb Material Search.
That should get you started. If you get bogged down, look at the materials used by successful 'bot builders in similar applications.
Q: What are tensile, impact, and yield strength? Which of these properties should I look for in robot armor?
A: Mark J. here: there are a lot of different measures of material strength, some of which are overlapping. Each measure may have several different test procedures that can be difficult to directly compare. Some useful material physical properties to examine include:
Tensile Strength is a measure of how much pulling force a material can withstand. It is commonly measured as the peak pulling force a material can withstand before it begins to fail (ultimate tensile strength).
Yield Strength is a measure of a specific attribute of tensile strength: the amount of pulling force required to permanently deform the material. Materials with low yield strengths tend to `smear' when hit with a high energy weapon.
Impact Strength is a measure of the amount of energy a material absorbs when breaking by impact. This is also known as 'toughness'. Some materials that are very strong are also brittle and can shatter under sharp impact. These make poor armor!
Modulus of Elasticity is a measure of material stiffness -- now much the material flexes in response to a specific amount of force. Materials with a higher elastic modulus flex less than materials with lower values.
Hardness is a measure of the resistance of a material to surface penetration. Hard materials do not scratch easily, but may be more brittle than softer material.
Density is a measure of the weight per unit volume of the material. Tests of material strength are conducted on samples of a specific size, not of a specific weight. A one inch diameter rod of 4130 steel may have twice the tensile strength of a one inch diameter rod of 6061 T6 aluminum, but it weighs three times as much! With a combat robot, you're generally looking for strength per unit weight.
Which of these properties are important depends on your armor design and what you expect your armor to do. Does your design allow the armor to flex and deform, or must the armor remain rigid and retain its shape? Is it important that your armor resist scratching and any sign of damage, or are you willing to sacrifice the armor to protect the internal components of the `bot?
Expense also enters into the equation. Polycarbonate (Lexan) and UHMW polyethylene plastics are incredibly tough and light materials that are easy to work with and quite inexpensive. However, they are soft, flexible, and show surface damage after a tough match. Top of the line 6AL-4V titanium alloy is very hard, impact resistant, and has a high yield strength. It rarely shows even a scratch after a match, but does give off bright sparks when hit with a rotary weapon. It's also expensive: about $80 for a square foot of 1/8" material. Be sure to have a look at our Armor Guide for more ideas.
The www.matweb.com site has information on the physical properties of a wide range of metals, plastics, and related materials.
Q: Can old VCR parts be used in a 'bot?
A: I really like recycling useable parts to make something new. You can also learn a few things about mechanical engineering by taking apart an old VCR. You probably won't find anything very useful in the way of drivetrain or electronic components but there are plenty of gears, belts, pulleys, and maybe even motors that could be used for a weapon system on an insect-class 'bot. Be aware that some of the motors in a VCR are likely brushless motors that require special electronic driver circuits to operate.
One problem with recycled parts is replacement spares. Unless you have another identical scrap VCR, it may be difficult and expensive to replace a recycled component damaged in combat.
Q: My lipoly seems to be bulging with air under the shrink wrap. Will that affect the performance of the battery? What should I do to maintain my Li-Poly battery?
A: Mark J. here: Your Li-Poly battery is toast! The usual cause of this 'outgassing' is overheating brought on by too high a discharge rate -- you're asking for more amps from the LiPoly than it can provide. Replace it with a larger capacity battery. It's also possible that your charger is providing the wrong charge rate. Never charge Lithium cells with a charger not designed for the purpose.
Whatever the cause, *** IT IS NOT SAFE TO USE THE BATTERY ***. Do not attempt to charge or discharge the battery. Drop the battery into a plastic bucket with 1/2 cup of salt dissolved in a gallon of water, cover the bucket, and let it set for at least two weeks. It will then be safe to toss out with the garbage.
Li-Polys are not nearly as robust as NiCad or NiMHd cells, and can be dangerous if abused. Electrifly.com has a good article on Li-Poly care.
Q: I've heard that silicone increases the traction of Lite-Flite tires. Where can I get silicone and how is it applied?
A: Mark J. here: A thin layer of silicone rubber does improve the traction of many types of tires and treads. Pure silicone rubber can be found at auto supply stores. It's used for making automotive gaskets ('RTV silicone gasket maker'). Pure silicone kitchen and bathroom caulking from a hardware store is also OK, but do not try to substitute similar products like 'Goop' or 'siliconized latex caulking'. Silicone rubber comes in assorted colors, but they are all about the same for grip.
The trick to application is in getting a good bond so the silicone rubber doesn't peel off. Clean the surface of the tire very thoroughly with rubbing alcohol and let dry. Uncured silicone rubber is sticky and messy to work with, so spread out some newspaper and have paper towels handy. Use a popsicle stick or old knife to spread a very thin layer of the gooey silicone evenly onto the tire surface. Apply enough pressure to get the rubber down into the tire pores, Wipe excess off the edges with a towel. Let 'cure' for at least a full day before use. Curing RTV silicone smells like vinegar.
Clean silicone grips better than dirty silicone, so clean your tires before each match. I use a little lighter fluid on a towel, but be very careful with any flammable liquid!
Remember: better traction means less wheel spin, and less wheel spin means higher amperage consumption by the motors. Make sure your speed controllers can take the extra load.
Q: I heard that magnesium is twice as strong as aluminum and only a quarter the weight. Have people used Mg in combat robots? If so, where is the best place to get some?
A: Mark J. here: Judging the relative strengths of metals is difficult and sometimes misleading. The tensile and yield strengths of magnesium are more than twice as great as common aluminum alloys, but the shear modulus is four times less, which means that magnesium is brittle; it tends to break rather than bend. This restricts its use in combat robots to internal braces and mounts that are not exposed to high impact. It would be really embarrassing to have your armor shatter and fall off!
Also, magnesium is not that light! Common alloys are about 67% the density of aluminum. You'll save a little weight, but it may not be worth the trouble for small parts.
One last thing - magnesium is flammable! If exposed to a high-energy weapon impact it could ignite, and water or CO2 fire extinguishers won't put it out! Your event organizer wouldn't like that.
I know that Biohazard uses some magnesium in its internal components, but in general people use more common materials. My metal suppliers don't stock magnesium, so you're on your own for a source.
Q: Can I hacksaw 1/16 in thick carbon fiber?. Right now, I don't have access to any other equipment. I just need small rectangular parts for my antweight. I know its bad to breathe in the CF dust, so should I wear some sort of mask?
Thank you.
A: Mark J. here: The preferred method of cutting carbon fiber is an abrasive cutting disk, but you can use a fine-toothed hacksaw.
Safety precautions when cutting or sanding carbon fiber include a dust mask (always!), safety goggles (always!), and gloves (always!). CF dust is very irritating, and jamming a loose carbon fiber into your flesh is painful, easy to do, and difficult to remove. Don't take shortcuts!
Q: What is 'unobtainium'?
A: Unobtainium:
an item so expensive, rare, or otherwise difficult to get that it is effectively unobtainable.
a reference to a material with physical properties that do not exist, as in "I broke the titanium hub, so I'll build the next one out of unobtainium to make it stronger and lighter."
Q: How can I make custom gears to fit a tiny motor so that I can create a 6-wheeler tread tiny robot?
A: Making custom gears requires machining skills and special equipment. It's much better to find gears that will work, but that can be difficult as well. Try a local hobby shop, or sift thru a surplus supply store. Old toys can yield valuable parts, too. Try a web search for 'slot car gears'.
Q: I've seen a white powder spill out of damaged drum weapons. What is it? What does it do?
A: Mark J. here: I did some research. A free-flowing powder placed inside a hollow cylinder can improve rotating balance. There's a product available for balancing automotive tires called 'Equal' that might be what you saw. Drum weapons are difficult to build precisely enough to be well balanced and can use all the help they can get!
Q: Where do builders buy flamethrowers?
A: They don't buy them, they build them. See the post on flamethrowers. They're ineffective and dangerous -- not for novice builders!
Q: What is the least expensive brand of drill? Is there a place that sells cheap 2 channel speed controllers for a 12 pound bot?
A: Mark J. here: One last time: 'Cheap' and 'Robot Combat' don't mix! If you're going to spend your time and effort to design and construct a robot and take it to to a competition, you don't want some crappy component to fail and flush the whole project.
Q: I saw a ant made with 'Delrin'. What is Delrin? Compared to Lexan, which is better?
A: Mark J. here: Delrin is an Acetal plastic developed more than 50 years ago by Dupont. It is a little heavier and stiffer than Lexan polycarbonate, but it is not nearly as impact resistant. Delrin makes good machined components (gears, bolts, actuators), but polycarbonate makes better armor.
Q: Are LiPoly batteries a good choice for a hobbyweight? What mAH capacity range do I need? Is it a good idea to have separate batteries for each ESC?
A: LiPoly batteries are a good choice for any weight class -- if you can afford them and can maintain them properly. They provide a lot of power for their weight, but they do have limits on their safe output amperage. Be sure to allow for that in your calculations.
Take a look at my dad's previous post about calculating battery capacity. For a starting point, I'd try about 2000 mAH for a hobbyweight with an active weapon.
Most builders use a single large capacity battery rather than multiple smaller batteries for each ESC. Multiple dedicated batteries could leave you with no drive power but plenty of weapon power still available. The single battery will also be better able to survive large amperage surges.
Q: Have you heard of a 'bot named 'Cobra'? It's a small (12 or 30 pound) wedge bot that's really fast. Where do I get motors like they use for under $30 apiece?
A: I don't know 'Cobra'. The official name database at BotRank.com does not show a 'bot named 'Cobra' in any weight class. Sorry.
Most hobbyweight (12 pound) and featherweight (30 pound) 'bots use cordless drill motors and gearboxes for their drive train. Top of the line is the DeWalt 18 volt drill motor and transmission, but a DeWalt with all drive components will run more than $150. Many builders in these classes use motors and gearboxes from less expensive, lower voltage drills. The 'Handiworks' 7.2 volt drill was once a favorite for this purpose, but they are no longer widely available. Look around your local discount tool store and you should be able to find something for $30.
You might want to reconsider your desire for 'really fast'. Robot combat is not a race and trying to drive a fast 'bot can be a real handful.
Q: Aaron, this is more of an answer than a question: in an earlier post someone asked for information about a 'bot named 'Cobra'. I have been privileged to see Cobra in action. It's a fast wedge bot from Sydney, Australia -- powered by modified DeWalt drills.
A: Thanks for the info! DeWalt has powered more top flight 'bots than I could possibly name here. Robot Marketplace offers a wide range of DeWalt motors and gearboxes, and Team Delta has the 18 volt DeWalt motors and gearboxes plus special combat mounts and driveshafts.
Q: Does scrap metal work well for light armor? [Chris Marnati]
A: 'Scrap metal' could be almost any type of material, Chris. Some could be great, some would be useless. I live in an area where I can get exotic scrap titanium from the aerospace industry that makes tremendous armor, but you may not be as lucky. Check my dad's Armor Guide to get some ideas.
Q: I don't know how to solder. Can I build a robot without soldering?
A: Soldering is a very good skill to develop for making all sorts of things. A soldered electrical connection is strong and unlikely to fail in combat. Some speed controllers do come with either pre-soldered or screw-type connectors, so you can build a 'bot without soldering. It would limit your choices of components.
Q: After shopping for Garolite at McMaster-Carr I realize there are many different kinds. Can you give me a general idea of which types are stronger or lighter?
A: Garolite is a branded composite fiber/resin material similar in properties but much less expensive than carbon fiber composite. Stick with the woven glass cloth varieties like G10 or G11 for general robotics construction for their high impact resistance. There's a good discussion of Garolite at the Spambutcher Robotics site.
Q: What is the best material to use to armor my `bot? How thick should it be? Where can I get it cheap?
A: Mark J. here: "Best" depends on lots of factors. Various metals, plastics, and composites are all useful for different designs, applications, budgets, and builder skill levels. Commonly used materials include:
Aluminum: Different alloys vary widely in strength. Don't use the stuff you can buy off the rack at the local home center - it is soft and weak. 6061-T6 alloy is nearly as strong as mild steel and is widely available thru metal dealers. Aircraft alloys like 2024-T3 and 7075-T6 are harder and nearly twice as strong, but more expensive and difficult to find. Aluminum armor has a tendency to `smear' and show damage.
Steel: There is a huge array of steel types: hot rolled, cold rolled, tool, stainless, high carbon, low carbon, plain carbon, mild, nickel, invar, chromium, tempered, annealed, quenched, ferritic, pearlitic, martensitic, killed, capped, spring, and chrome moly - to name a few. If you want to use steel, do your homework and pick out something suitable. Mild steel (called `1018') and Chrome Moly (`4130') are commonly available. Other alloys offer greater strength for the same weight, but mild steel is cheap and you can find it in sheets, angles, and rods at your local hardware store or home center. See also other posts about steel alloys and terminology.
Titanium: Top of the line `bot armor, titanium is nearly as light as aluminum and nearly as strong as alloy steel. It's also very expensive, tricky to work with, and makes pretty white sparks when hit hard with a rotary weapon. A common alloy used for `bots is 6AL-4V.
Lexan: Also known as polycarbonate, Lexan is a clear, lightweight plastic with an enormous capacity to absorb impact and pop back to its original shape. Leave room for the material to flex when designing - fastening points are common failure sites. Lexan can also be chemically welded for very strong joints. You can find Lexan at your local glass shop or home center, but make sure you're getting polycarbonate and not clear acrylic plastic - acrylic is useless for `bot armor.
Polyethylene: Ultra-high molecular weight (UHMW) polyethylene plastic is lightweight, cut resistant, unbreakable, and very easy to machine. It takes huge abuse and bounces back for more. Thin sheets are flexible, but thick plates can be used for motor mounts and main chassis components.
Carbon Fiber: Amazingly stiff, strong and light -- but when it fails it comes all apart! Great for small `bot chassis plates and top armor. Expensive!
Fiberglass: A blend of woven glass fiber and a resin media, there are lots of fiberglass formulations. A high performance type called Garolite is popular with some insect-class builders for chassis plates and armor. It is heavier, less strong, and less stiff than carbon fiber composite but much less expensive.
Thickness: The simple answer to "how thick" is, "as thick as you can make it and still make weight." The strength of your armor will depend on the material you're using, the support the armor has, the location of the armor, the angle of the armor, and the size and shape of the piece -- as well as thickness. In general, top armor can be fairly thin, chassis plates and side armor thicker, weapon/drive mounts and wedges thicker still.
Look at successful 'bots with designs similar to your own and use their experience as a guide to your own project. If calculations like this were easy, it wouldn't take four years to get an engineering degree. To quote Team Juggerbot, "Damage is weakness leaving the robot." If it fails, make it stronger next time.
Sources: Locally, I have specialty aerospace manufacturers with scrap outlets from which I can buy titanium at low prices. Check your local resources for unusual opportunities. For things you can't find locally, The Robot Marketplace offers a wide variety of metals, plastics, and composites in small quantities for `bot builders.
Remember, you don't have to use the most exotic materials to make a winning `bot. I've built two champion robots with wood armor!
NOTE: This guide was written in 2006 -- today's combat robot weaponry is much more destructive. Pre-hardened abrasion-resistant steel alloys (AR-400, AR-500, Hardox...) are now in common use in all weight classes. As it says above, look at 'bots with designs similar to your own and use their experience as a guide.
Date marker: February 2006
Q: Where can I find an inexpensive servo? [Garret B.]
A: OK, everyone say it at once: EBay! You should be able to buy standard servos for $10 or less. Your local hobby shop may cut you a deal on some and save you shipping costs.
Q: Where can I find strong tape that sticks to plastic? I need something better than duct tape.
A: Clear plastic 'Package Tape' is available pretty much anywhere. It might be good enough for your purpose.
If you really want the good stuff, 3M makes a specialty tape that's super strong, very flexible, and so sticky it will even bond to polyethylene. I use it to hinge the side skirts on my beetleweight. It's called 3M #396 Super Bond Film Tape. It's hard to find and it isn't cheap.
Q: Where can I buy polycarbonate plastic (Lexan) for 'bot armor?
A: Check with local sources that sell window glass. They often sell polycarbonate as burglar-proof window material. Your local home center may also have polycarbonate, but make sure it's the real stuff -- they may also sell clear acrylic plastic that is not nearly as strong. Check the yellow pages under 'Plastic' as well.
If you can't find what you need locally, www.robotmarketplace.com sells a variety of materials suitable for 'bot armor (Lexan. carbon fiber, titanium). Check their Metals & Materials section.
Q: My bot design has tank threads, but I don't know where to get them. Can you help me?
A: You don't mention how large your robot is going to be. For smaller 'bots, take a look at the 'Rubber Treads' section at www.classictintoy.com. For a medium sized 'bot automotive V-belts or timing belts might do. Big 'bots can use treads from light equipment like snow blowers.
Remember that treads are heavier than wheels, often fail in battle, and are easy to attack. They're also expensive.
Q: Were do you get your parts? (Anon)
A: We get parts from many sources: our local hobby shop, pieces scavenged from toys, stuff we make ourselves, and web stores. Places you might try:














 Q: could you help compare High-Density Polyethylene to PCB and carbon fiber? [Hot 'Lanta]
Q: could you help compare High-Density Polyethylene to PCB and carbon fiber? [Hot 'Lanta]
 Sticky treads collect dust, grit, and oil which smear around their surface. Casting or cutting lateral and/or diagonal grooves into the tire provides voids into which the tire can wipe collected gunk, allowing the tire to clean itself rather than just continuing the smearing. Diagonal grooves give a smoother rolling action than do lateral grooves.
Sticky treads collect dust, grit, and oil which smear around their surface. Casting or cutting lateral and/or diagonal grooves into the tire provides voids into which the tire can wipe collected gunk, allowing the tire to clean itself rather than just continuing the smearing. Diagonal grooves give a smoother rolling action than do lateral grooves.
 You might get a few ideas from this video: Build a Cereal Box Combat Robot!
You might get a few ideas from this video: Build a Cereal Box Combat Robot!
 Q: How do builders in the heavier weight classes go about attaching a pulley to their weapon motor shaft? I know set screws can't be the answer here. I've seen some builders reshaft their motors with a thicker shaft for a keyway but are there any other methods out there? [Sacramento-ish]
Q: How do builders in the heavier weight classes go about attaching a pulley to their weapon motor shaft? I know set screws can't be the answer here. I've seen some builders reshaft their motors with a thicker shaft for a keyway but are there any other methods out there? [Sacramento-ish]
 Q: 1mm titanium vs 5mm aluminum: which is better? I'm asking for my "Break-Your-Fist-on-my-Face™" configuration for Flamin'Yon. It's still a standard Viper wedge kit (so no bad hamburgers, I'm assuming?).
Q: 1mm titanium vs 5mm aluminum: which is better? I'm asking for my "Break-Your-Fist-on-my-Face™" configuration for Flamin'Yon. It's still a standard Viper wedge kit (so no bad hamburgers, I'm assuming?).
 A: Mark J. The combat 'Brazil wheels' used by several BattleBots teams are from RoboCore Tecnologia LTDA in Brazil. They are a single-piece wheel/tire made from vulcanized rubber with a small keyed aluminum hub. The wheels come in three sizes suited to hobbyweight thru heavyweight classes with prices ranging from $37 US to $72 US per wheel:
A: Mark J. The combat 'Brazil wheels' used by several BattleBots teams are from RoboCore Tecnologia LTDA in Brazil. They are a single-piece wheel/tire made from vulcanized rubber with a small keyed aluminum hub. The wheels come in three sizes suited to hobbyweight thru heavyweight classes with prices ranging from $37 US to $72 US per wheel:
 Q: I recently purchased some 4mm ID Flanged Ball Bearings and 4mm shafts from Servocity. Both are from the same brand, but they don't fit. The ball bearings are slightly too small, I can get them partially on the shaft if I hit it hard enough with a hammer (I know, not the best idea). I already tried putting the shafts in the freezer, and that didn't work. What should I do to make them fit? [Waltham, Massachusetts]
Q: I recently purchased some 4mm ID Flanged Ball Bearings and 4mm shafts from Servocity. Both are from the same brand, but they don't fit. The ball bearings are slightly too small, I can get them partially on the shaft if I hit it hard enough with a hammer (I know, not the best idea). I already tried putting the shafts in the freezer, and that didn't work. What should I do to make them fit? [Waltham, Massachusetts]
 Q: AR500 and S7 weapons are all the rage, but AR will eat my little hobby mill for breakfast, and heat treating S7 requires more than a torch and a bucket of oil.
Q: AR500 and S7 weapons are all the rage, but AR will eat my little hobby mill for breakfast, and heat treating S7 requires more than a torch and a bucket of oil.
 Q: I'm using Plastite screws to hold UHMW plastic panels for my chassis. Does Loctite Blue work with UHMW or does it have to be a metal on metal thread? If not, is there an alternative out there that people use? [Parker, Colorado]
Q: I'm using Plastite screws to hold UHMW plastic panels for my chassis. Does Loctite Blue work with UHMW or does it have to be a metal on metal thread? If not, is there an alternative out there that people use? [Parker, Colorado]
 They're just over $5AU each, which is about $3.75US.
They're just over $5AU each, which is about $3.75US.
 A: Mark J. If you know specifically what type of material you'll be cutting with a circular saw you can match the saw blade design to that material and get an optimum cutting rate. The selected saw blade might have twenty teeth or a hundred and fifty teeth, and those teeth might be steel, carbide, or something more exotic. For some materials you might choose a blade made entirely from an abrasive ceramic.
A: Mark J. If you know specifically what type of material you'll be cutting with a circular saw you can match the saw blade design to that material and get an optimum cutting rate. The selected saw blade might have twenty teeth or a hundred and fifty teeth, and those teeth might be steel, carbide, or something more exotic. For some materials you might choose a blade made entirely from an abrasive ceramic.
 Hey, I just realized the sheet of UHMW I thought I bought is actually a sheet of acetal copolymer. I'm not too familiar with plastic properties, and I'm looking to make saifu kit-style rounded wheelguards. Is acetal copolymer a bad choice for something like that? [Philadelphia, Pennsylvania]
Hey, I just realized the sheet of UHMW I thought I bought is actually a sheet of acetal copolymer. I'm not too familiar with plastic properties, and I'm looking to make saifu kit-style rounded wheelguards. Is acetal copolymer a bad choice for something like that? [Philadelphia, Pennsylvania]
 Q: Im having trouble finding a name for my new beetleweight. I'd like to use a meme, but theyre all taken. What have I missed?
Q: Im having trouble finding a name for my new beetleweight. I'd like to use a meme, but theyre all taken. What have I missed?  A: Mark J. You're considering two materials with very different properties.
A: Mark J. You're considering two materials with very different properties.
 Unless you're prepared to design, manufacture, test, and certify your own components -- like Team Whyachi does for heavyweight 'Hydra' -- you are unlikely to piece together an effective hydraulic weapon system.
Unless you're prepared to design, manufacture, test, and certify your own components -- like Team Whyachi does for heavyweight 'Hydra' -- you are unlikely to piece together an effective hydraulic weapon system.
 A: Mark J. The process is very similar to mounting a brushed motor. Here's a bare-bones description based on info from builder Emmanuel Carrillo:
A: Mark J. The process is very similar to mounting a brushed motor. Here's a bare-bones description based on info from builder Emmanuel Carrillo:


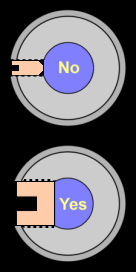 Q: Set screws on my insect-class robot hubs are driving me crazy. They won't hold!!! All I've got is hand tools. Is there anything I can do to make my wheel/gear/pulley hubs more reliable?
Q: Set screws on my insect-class robot hubs are driving me crazy. They won't hold!!! All I've got is hand tools. Is there anything I can do to make my wheel/gear/pulley hubs more reliable? 
 Q: Hey It's me from Anacortes again. The development of my robot has led to a couple more questions. Shortly after I designed a major component of my robot around 2.5 inch fingertech foam snap wheels, they went out of stock. I signed up for them to notify me when it gets back in stock, but I don't know if need to start looking for an alternate wheel solution. By now over half of the snap wheels are out of stock. Has this happened before?
Q: Hey It's me from Anacortes again. The development of my robot has led to a couple more questions. Shortly after I designed a major component of my robot around 2.5 inch fingertech foam snap wheels, they went out of stock. I signed up for them to notify me when it gets back in stock, but I don't know if need to start looking for an alternate wheel solution. By now over half of the snap wheels are out of stock. Has this happened before?
 Note A builder on the on-line forums reports that there is a lot of variation in the 'squishiness' of the compliant wheels, even within the same size and compound. There may be some production consistency problems. Stay tuned.
Note A builder on the on-line forums reports that there is a lot of variation in the 'squishiness' of the compliant wheels, even within the same size and compound. There may be some production consistency problems. Stay tuned.
 Q: When I was looking through pictures and build reports of insect weight robots, and I noticed that some builders use these orange belts that apparently can be cut to size and melted into a loop. In the picture I attached, you can see in use both on the weapon and drivetrain. Where can I find a belt like this, and what sort of applications do you recommend it for? [Oak Harbor, Washington]
Q: When I was looking through pictures and build reports of insect weight robots, and I noticed that some builders use these orange belts that apparently can be cut to size and melted into a loop. In the picture I attached, you can see in use both on the weapon and drivetrain. Where can I find a belt like this, and what sort of applications do you recommend it for? [Oak Harbor, Washington]
 The question of 'how hard' then depends on your selected alloy:
The question of 'how hard' then depends on your selected alloy:
 A: Mark J. The distributor of your chosen timing belt and pulleys will likely have an on-line pulley and belt calculator to assist in the selection of pulleys and belt that will provide your desired speed reduction at your desired distance between the centers of the two pulleys. Example: FingerTech Pulley & Belt Calculator.
A: Mark J. The distributor of your chosen timing belt and pulleys will likely have an on-line pulley and belt calculator to assist in the selection of pulleys and belt that will provide your desired speed reduction at your desired distance between the centers of the two pulleys. Example: FingerTech Pulley & Belt Calculator.
 Q: Do you think it is practical to add an idler that can be used in the case that something happens like the chassis gets tweaked and you loose tension on the belt? Or is it not worth bothering with? [Martinsburg, West Virginia]
Q: Do you think it is practical to add an idler that can be used in the case that something happens like the chassis gets tweaked and you loose tension on the belt? Or is it not worth bothering with? [Martinsburg, West Virginia]
 Machine screws / bolts are designed and rated to resist a 'pull' force that is tested by a machine that applies a gradually increasing force. That type of strength is important in many applications, but it is not the type of load fasteners will face when holding combat robot armor. Forces encountered in combat are typically sudden 'shock' loads that may have a high 'shear loading' factor. Ideally, mounting should be designed to prevent shear load on bolts, but combat impact vectors are unpredictable -- you need to design for all possible loads.
Machine screws / bolts are designed and rated to resist a 'pull' force that is tested by a machine that applies a gradually increasing force. That type of strength is important in many applications, but it is not the type of load fasteners will face when holding combat robot armor. Forces encountered in combat are typically sudden 'shock' loads that may have a high 'shear loading' factor. Ideally, mounting should be designed to prevent shear load on bolts, but combat impact vectors are unpredictable -- you need to design for all possible loads.
 If your bolt heads are exposed to possible spinner attack, you'll want to countersink the heads to prevent the spinner from grabbing exposed 'spinner bait' and tossing your 'bot and/or shearing the bolt heads.
If your bolt heads are exposed to possible spinner attack, you'll want to countersink the heads to prevent the spinner from grabbing exposed 'spinner bait' and tossing your 'bot and/or shearing the bolt heads.
 A: Mark J. Yes, you can turn the 4:1 P60 into a 5:1 P60. Parts cost is about $25 - shipped.
A: Mark J. Yes, you can turn the 4:1 P60 into a 5:1 P60. Parts cost is about $25 - shipped.

 Q: So I heard from somewhere that 'Tombstone' had carbon armour but from somewhere else that he had metal armour. Which one is true? Thanks! [Turks and Caicos Islands]
Q: So I heard from somewhere that 'Tombstone' had carbon armour but from somewhere else that he had metal armour. Which one is true? Thanks! [Turks and Caicos Islands]
 The most common way to get some impact slip protection for the motor is to use a round or v-belt drive to the weapon. The inclusion of a belt tension mechanism allows for adjustment of the amount of slippage: tight enough to keep the spin-up quick, loose enough to slip on a big impact.
The most common way to get some impact slip protection for the motor is to use a round or v-belt drive to the weapon. The inclusion of a belt tension mechanism allows for adjustment of the amount of slippage: tight enough to keep the spin-up quick, loose enough to slip on a big impact.
 My tool of choice for a safe and well controlled cut is an Exacto #13869 Pointed Blade in an Exacto #5 Heavy Duty Handle. Work on a firm surface and keep your fingers clear. It doesn't need to be pretty to be effective.
My tool of choice for a safe and well controlled cut is an Exacto #13869 Pointed Blade in an Exacto #5 Heavy Duty Handle. Work on a firm surface and keep your fingers clear. It doesn't need to be pretty to be effective.
 A: Mark J. That's easy...
A: Mark J. That's easy...
 Q: Hi again, I have a antweight combat robot that has a wedge leading up to a vertical spinner. The wedge is 1mm thick grade 5 titanium, and sits at a 40 degree angle, and screws thread into heat set inserts that are in the 3D printed chassis. The issue is that when I practice driving (with the weapon disconnected) I find that the cap screws are getting in the way of the dummy robot getting fed all the up the wedge. Is there anything I can do? [Great Falls, Montana]
Q: Hi again, I have a antweight combat robot that has a wedge leading up to a vertical spinner. The wedge is 1mm thick grade 5 titanium, and sits at a 40 degree angle, and screws thread into heat set inserts that are in the 3D printed chassis. The issue is that when I practice driving (with the weapon disconnected) I find that the cap screws are getting in the way of the dummy robot getting fed all the up the wedge. Is there anything I can do? [Great Falls, Montana]
 Shock absorption is a too-frequently overlooked aspect of armor mounting. In combat robotics, layered armor has proven inferior to single-piece armor with rubber shock mounts. The photos at right show the front armor pods and rubber shock mounts used on BattleBots competitor 'Overhaul'. Properly sized mounts will be quite firm -- they will barely flex under the best pressure you can exert on the panel by hand.
Shock absorption is a too-frequently overlooked aspect of armor mounting. In combat robotics, layered armor has proven inferior to single-piece armor with rubber shock mounts. The photos at right show the front armor pods and rubber shock mounts used on BattleBots competitor 'Overhaul'. Properly sized mounts will be quite firm -- they will barely flex under the best pressure you can exert on the panel by hand.
 Q: What kind of wheels are these? [photo of Brazilian robot deleted] Are they custom or got from someplace?
Q: What kind of wheels are these? [photo of Brazilian robot deleted] Are they custom or got from someplace?
 Q: Hello, I am trying to build a Featherweight robot in my garage, but our budget is semi-tight, and we live on Cape Cod, I want to know where I can get some parts for cheap, like a surplus house or something.
Q: Hello, I am trying to build a Featherweight robot in my garage, but our budget is semi-tight, and we live on Cape Cod, I want to know where I can get some parts for cheap, like a surplus house or something.
 Q: How are the chains and sprockets connected to each other in the Whyachi 2-stage reduction "gearbox"? I saw pictures of the inside but I don't get how it works. [Quebec]
Q: How are the chains and sprockets connected to each other in the Whyachi 2-stage reduction "gearbox"? I saw pictures of the inside but I don't get how it works. [Quebec]
 Q: how can i fix a big wheel on a live axle? something like hypershock or witch doctor would be great and even better if you could post a diagram
Q: how can i fix a big wheel on a live axle? something like hypershock or witch doctor would be great and even better if you could post a diagram  A: Mark J. There are good reasons why you can't find so large a pulley for so small a shaft-- it's poor engineering practice. You haven't told me what you're building, but I can't think of an application where this would be a good idea. I'd feel much better about this if you'd share your design with me; I might be able to head off a problem.
A: Mark J. There are good reasons why you can't find so large a pulley for so small a shaft-- it's poor engineering practice. You haven't told me what you're building, but I can't think of an application where this would be a good idea. I'd feel much better about this if you'd share your design with me; I might be able to head off a problem.
 Q: How can I install a pulley on a brushless outrunner motor? [Quebec, Canada]
Q: How can I install a pulley on a brushless outrunner motor? [Quebec, Canada]
 As it says in Frequently Asked Questions #17, Ask Aaron is not a free engineering service. I'm not able to provide a stress analysis of your chassis design and recommend a specific material and thickness for every part. In general, a change from titanium to aluminum alloy for a specific component will require that the new component be heavier and bulkier, and its ability to absorb shock loading and resist surface deformation may be decreased.
As it says in Frequently Asked Questions #17, Ask Aaron is not a free engineering service. I'm not able to provide a stress analysis of your chassis design and recommend a specific material and thickness for every part. In general, a change from titanium to aluminum alloy for a specific component will require that the new component be heavier and bulkier, and its ability to absorb shock loading and resist surface deformation may be decreased.
 Q: I've been to combot events and seen this sort of latex like coating people put of the foam tires, any chance you know what this is? See the photo at right. [direct email]
Q: I've been to combot events and seen this sort of latex like coating people put of the foam tires, any chance you know what this is? See the photo at right. [direct email]
 2. What is the purpose of shaft collars?
2. What is the purpose of shaft collars?
 Disadvantages:
Disadvantages:
 A: Mark J. Anodizing is a process that thickens the natural layer of oxidation on the surface of certain metals. The thickened layer of oxide can reduce surface wear and improve corrosion resistance, but it does not effect the physical properties of the metal beneath the surface. You don't weaken the material by anodizing it.
A: Mark J. Anodizing is a process that thickens the natural layer of oxidation on the surface of certain metals. The thickened layer of oxide can reduce surface wear and improve corrosion resistance, but it does not effect the physical properties of the metal beneath the surface. You don't weaken the material by anodizing it.
 Different types of traction compound are applicable to different types of rubber and to differing conditions. First, check your event rules about tires and traction compounds. Many events forbid applying anything 'sticky' to the tire, and most would not be pleased to have you use a compound that leaves a residue on the arena surface.
Different types of traction compound are applicable to different types of rubber and to differing conditions. First, check your event rules about tires and traction compounds. Many events forbid applying anything 'sticky' to the tire, and most would not be pleased to have you use a compound that leaves a residue on the arena surface.
 Q: Hi Mark. Hope you are well.
Q: Hi Mark. Hope you are well.
 A: Mark J. Previously discussed. Search the
A: Mark J. Previously discussed. Search the 
 Q: Which tyre team plumbcrazy use in there bot Pipe wench & Devils plunger? &is colson is better than this tyre ? [India]
Q: Which tyre team plumbcrazy use in there bot Pipe wench & Devils plunger? &is colson is better than this tyre ? [India]
 Q: Aaron, I am near completion on my antweight, but I'm a bit cautious. I was hoping to have a 'ring' like that on Weta. I'm wondering what material to use. I already have some .05" aluminum 6061. Thanks, Maryland
Q: Aaron, I am near completion on my antweight, but I'm a bit cautious. I was hoping to have a 'ring' like that on Weta. I'm wondering what material to use. I already have some .05" aluminum 6061. Thanks, Maryland
 A: Mark J. here: it's called a quarter-turn belt drive (see diagram - discussion here). It isn't terribly compact and it cannot transmit as much power as a conventional parallel axle arrangement. You've stumbled upon the reason why there are few right-angle drive spinners: it's often easier to design a robot than it is to find the components needed to build it.
A: Mark J. here: it's called a quarter-turn belt drive (see diagram - discussion here). It isn't terribly compact and it cannot transmit as much power as a conventional parallel axle arrangement. You've stumbled upon the reason why there are few right-angle drive spinners: it's often easier to design a robot than it is to find the components needed to build it.
 A: Team JuggerBot fabricated their own. I suspect you'll need to do the same. It might be worth an email to Mike Morrow at Team JuggerBot -- last time I was there Mike was trying to clean out some excess stuff from his workshop and there might be some spikes lying around.
A: Team JuggerBot fabricated their own. I suspect you'll need to do the same. It might be worth an email to Mike Morrow at Team JuggerBot -- last time I was there Mike was trying to clean out some excess stuff from his workshop and there might be some spikes lying around.
 Q: What would you think of Lego pieces for armour. Not that I'd just snap them in, I'd hot glue them together or something.
Q: What would you think of Lego pieces for armour. Not that I'd just snap them in, I'd hot glue them together or something.
 A: Kevlar is a good choice for armor. It is more flexible than CF and does not shatter, even when the resin fails. However, armor made of layers of materials with differing properties can be very tricky. In this case, the Kevlar will flex and transfer most of the impact force to the stiff thin carbon fiber layer which will shatter. I think I'd stick with straight Kevlar. The most effective armor materials are those that can flex to absorb heavy impact.
A: Kevlar is a good choice for armor. It is more flexible than CF and does not shatter, even when the resin fails. However, armor made of layers of materials with differing properties can be very tricky. In this case, the Kevlar will flex and transfer most of the impact force to the stiff thin carbon fiber layer which will shatter. I think I'd stick with straight Kevlar. The most effective armor materials are those that can flex to absorb heavy impact. A: Hmmmm... that's not what I would consider to be good mounting support. The force applied to the wedge is going to be at a point farthest away from the mount, and the aluminum has already been bent at an angle below the mounting point. You're going to bend the wedge further downward with a good hit. Good engineering practice calls for more support closer to the point where the force will be applied. A full-width brace between the chassis and the wedge would greatly strengthen structure. With that brace, your .05" 7075 wedge should be great.
A: Hmmmm... that's not what I would consider to be good mounting support. The force applied to the wedge is going to be at a point farthest away from the mount, and the aluminum has already been bent at an angle below the mounting point. You're going to bend the wedge further downward with a good hit. Good engineering practice calls for more support closer to the point where the force will be applied. A full-width brace between the chassis and the wedge would greatly strengthen structure. With that brace, your .05" 7075 wedge should be great. Q: What exactly is a linear actuator? What can they be used for in combat robots?
Q: What exactly is a linear actuator? What can they be used for in combat robots?

